Include dependency graph for PriorityQueue.h:
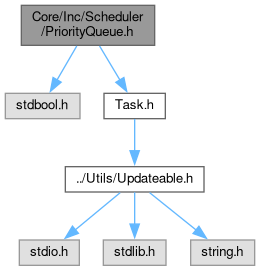
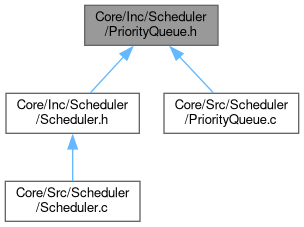
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | PQNode |
| struct | PriorityQueue |
Macros | |
| #define | MAX_SENSORS 10 |
Functions | |
| void | PQInit (PriorityQueue *pq) |
| Initializes the priority queue. More... | |
| bool | PQPush (PriorityQueue *pq, Task task, int priority) |
| Pushes a task with a given priority onto the priority queue. More... | |
| bool | PQPop (PriorityQueue *pq, Task *task) |
| Pops the highest priority task from the priority queue. More... | |
| bool | PQPeek (PriorityQueue *pq, Task *task) |
| Peeks at the highest priority task in the priority queue without removing it. More... | |
| bool | PQIsEmpty (PriorityQueue *pq) |
| Checks if the priority queue is empty. More... | |
| bool | PQIsFull (PriorityQueue *pq) |
| Checks if the priority queue is full. More... | |
Macro Definition Documentation
◆ MAX_SENSORS
| #define MAX_SENSORS 10 |
Definition at line 8 of file PriorityQueue.h.
Function Documentation
◆ PQInit()
| void PQInit | ( | PriorityQueue * | pq | ) |
Initializes the priority queue.
- Parameters
-
pq Pointer to the PriorityQueue structure to initialize.
Definition at line 3 of file PriorityQueue.c.
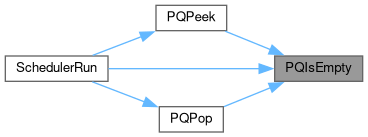
◆ PQIsEmpty()
| bool PQIsEmpty | ( | PriorityQueue * | pq | ) |
Checks if the priority queue is empty.
- Parameters
-
pq Pointer to the PriorityQueue structure.
- Returns
- True if the queue is empty, false otherwise.
Definition at line 62 of file PriorityQueue.c.
Here is the caller graph for this function:
◆ PQIsFull()
| bool PQIsFull | ( | PriorityQueue * | pq | ) |
Checks if the priority queue is full.
- Parameters
-
pq Pointer to the PriorityQueue structure.
- Returns
- True if the queue is full, false otherwise.
Definition at line 66 of file PriorityQueue.c.
66 {
68}
Here is the caller graph for this function:
◆ PQPeek()
| bool PQPeek | ( | PriorityQueue * | pq, |
| Task * | task | ||
| ) |
Peeks at the highest priority task in the priority queue without removing it.
- Parameters
-
pq Pointer to the PriorityQueue structure. task Pointer to the Task structure to store the peeked task.
- Returns
- True if a task was successfully peeked, false if the queue is empty.
Definition at line 56 of file PriorityQueue.c.
56 {
59 return true;
60}
bool PQIsEmpty(PriorityQueue *pq)
Checks if the priority queue is empty.
Definition: PriorityQueue.c:62
Here is the call graph for this function:

◆ PQPop()
| bool PQPop | ( | PriorityQueue * | pq, |
| Task * | task | ||
| ) |
Pops the highest priority task from the priority queue.
- Parameters
-
pq Pointer to the PriorityQueue structure. task Pointer to the Task structure to store the popped task.
- Returns
- True if a task was successfully popped, false if the queue is empty.
Definition at line 48 of file PriorityQueue.c.
48 {
52 heapifyDown(pq, 1);
53 return true;
54}
void heapifyDown(PriorityQueue *pq, int index)
Restores the heap property by moving the node at the given index down.
Definition: PriorityQueue.c:29
Here is the call graph for this function:
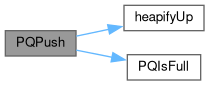
◆ PQPush()
| bool PQPush | ( | PriorityQueue * | pq, |
| Task | task, | ||
| int | priority | ||
| ) |
Pushes a task with a given priority onto the priority queue.
- Parameters
-
pq Pointer to the PriorityQueue structure. task The task to push onto the queue. priority The priority of the task.
- Returns
- True if the task was successfully pushed, false if the queue is full.
Definition at line 41 of file PriorityQueue.c.
41 {
45 return true;
46}
void heapifyUp(PriorityQueue *pq, int index)
Restores the heap property by moving the node at the given index up.
Definition: PriorityQueue.c:13
Definition: PriorityQueue.h:10
Here is the call graph for this function: