: Main program body More...
#include "main.h"#include "cmsis_os.h"#include "../Inc/Files/can1_dbc.h"#include "../Inc/Scheduler/Scheduler.h"#include "../Inc/Sensors/AnalogSensor.h"#include "../Inc/Systems/Comms/Can/Can.h"#include "../Inc/Systems/Controller/Apps.h"#include "../Inc/Systems/Controller/BrakeSystemControl.h"#include "../Inc/Systems/Controller/RTD.h"#include "../Inc/Systems/Controller/TorqueControl.h"#include "../Inc/Systems/External/Inverter.h"#include "../Inc/Systems/Monitor/AppsMonitor.h"#include "../Inc/Systems/Monitor/BrakePolice.h"#include "../Inc/Systems/Monitor/RTDMonitor.h"#include "../Inc/Systems/Monitor/TorquePolice.h"#include "../Inc/Utils/Constants.h"#include "../Inc/Utils/Telemetry.h"#include "stm32f7xx_hal_adc.h"#include "stm32f7xx_it.h"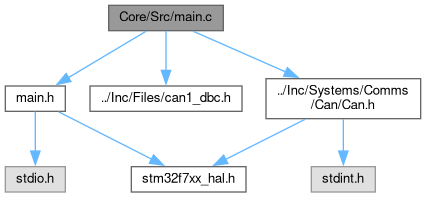
Go to the source code of this file.
Functions | |
| void | SystemClock_Config (void) |
| System Clock Configuration. More... | |
| static void | MX_GPIO_Init (void) |
| GPIO Initialization Function. More... | |
| static void | MX_DMA_Init (void) |
| static void | MX_TIM1_Init (void) |
| TIM1 Initialization Function. More... | |
| static void | MX_ADC1_Init (void) |
| ADC1 Initialization Function. More... | |
| static void | MX_ADC2_Init (void) |
| ADC2 Initialization Function. More... | |
| static void | MX_ADC3_Init (void) |
| ADC3 Initialization Function. More... | |
| static void | MX_CAN1_Init (void) |
| CAN1 Initialization Function. More... | |
| static void | MX_CAN2_Init (void) |
| CAN2 Initialization Function. More... | |
| static void | MX_USART3_UART_Init (void) |
| USART3 Initialization Function. More... | |
| static void | MX_TIM2_Init (void) |
| TIM2 Initialization Function. More... | |
| static void | MX_DAC_Init (void) |
| DAC Initialization Function. More... | |
| static void | MX_CAN3_Init (void) |
| CAN3 Initialization Function. More... | |
| static void | MX_I2C2_Init (void) |
| I2C2 Initialization Function. More... | |
| static void | MX_I2C4_Init (void) |
| I2C4 Initialization Function. More... | |
| static void | MX_SPI4_Init (void) |
| SPI4 Initialization Function. More... | |
| static void | MX_SPI6_Init (void) |
| SPI6 Initialization Function. More... | |
| void | StartDefaultTask (void *argument) |
| Function implementing the defaultTask thread. More... | |
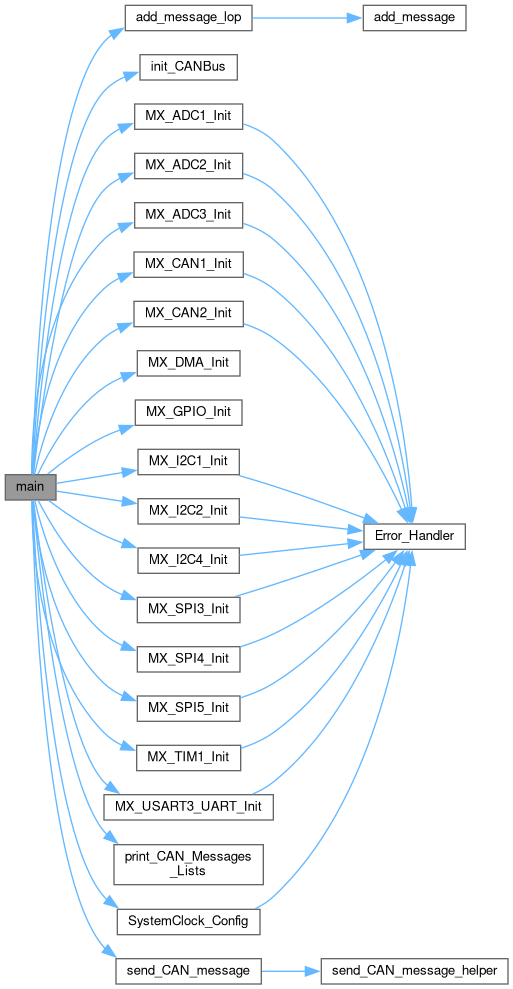
| int | main (void) |
| The application entry point. More... | |
| int | _write (int file, char *data, int len) |
| void | vApplicationMallocFailedHook (void) |
| void | vApplicationIdleHook (void) |
| void | vApplicationStackOverflowHook (TaskHandle_t xTask, char *pcTaskName) |
| void | vApplicationTickHook (void) |
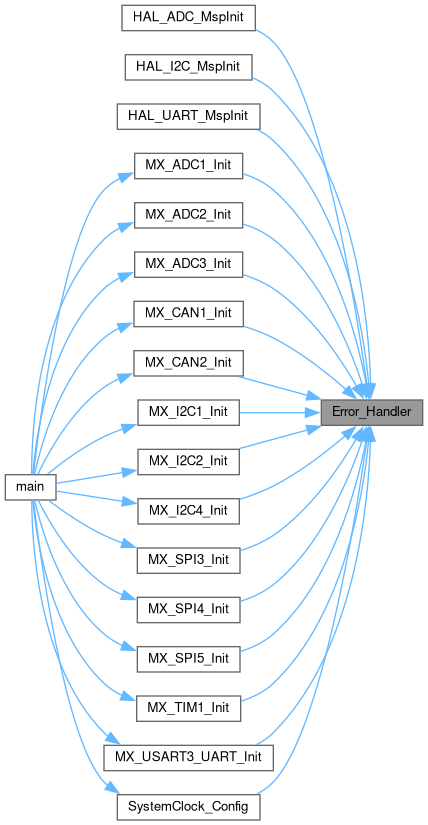
| void | Error_Handler (void) |
| This function is executed in case of error occurrence. More... | |
Variables | |
| ADC_HandleTypeDef | hadc1 |
| ADC_HandleTypeDef | hadc2 |
| ADC_HandleTypeDef | hadc3 |
| DMA_HandleTypeDef | hdma_adc1 |
| DMA_HandleTypeDef | hdma_adc2 |
| DMA_HandleTypeDef | hdma_adc3 |
| CAN_HandleTypeDef | hcan1 |
| CAN_HandleTypeDef | hcan2 |
| CAN_HandleTypeDef | hcan3 |
| DAC_HandleTypeDef | hdac |
| DMA_HandleTypeDef | hdma_dac1 |
| DMA_HandleTypeDef | hdma_dac2 |
| I2C_HandleTypeDef | hi2c2 |
| I2C_HandleTypeDef | hi2c4 |
| SPI_HandleTypeDef | hspi4 |
| SPI_HandleTypeDef | hspi6 |
| TIM_HandleTypeDef | htim1 |
| TIM_HandleTypeDef | htim2 |
| UART_HandleTypeDef | huart3 |
| osThreadId_t | defaultTaskHandle |
| const osThreadAttr_t | defaultTask_attributes |
| uint32_t | adc1_buffer [ADC1_CHANNEL_SIZE] |
| uint32_t | adc2_buffer [ADC2_CHANNEL_SIZE] |
| uint32_t | adc3_buffer [ADC3_CHANNEL_SIZE] |
| uint32_t | dac1_buffer [DAC1_BUFFER_SIZE] |
| uint32_t | dac2_buffer [DAC2_BUFFER_SIZE] |
| uint8_t | digital_out_buffer [NUM_DIGITAL_OUTPUTS] |
| uint8_t | digital_in_buffer [NUM_DIGITAL_INPUTS] |
Detailed Description
: Main program body
- Attention
Copyright (c) 2024 STMicroelectronics. All rights reserved.
This software is licensed under terms that can be found in the LICENSE file in the root directory of this software component. If no LICENSE file comes with this software, it is provided AS-IS.
Definition in file main.c.
Function Documentation
◆ _write()
| int _write | ( | int | file, |
| char * | data, | ||
| int | len | ||
| ) |
◆ Error_Handler()
| void Error_Handler | ( | void | ) |
This function is executed in case of error occurrence.
- Return values
-
None
Definition at line 1530 of file main.c.
◆ main()
| int main | ( | void | ) |
The application entry point.
- Return values
-
int
Definition at line 139 of file main.c.
◆ MX_ADC1_Init()
|
static |
ADC1 Initialization Function.
- Parameters
-
None
- Return values
-
None
Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Definition at line 441 of file main.c.


◆ MX_ADC2_Init()
|
static |
ADC2 Initialization Function.
- Parameters
-
None
- Return values
-
None
Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Definition at line 546 of file main.c.


◆ MX_ADC3_Init()
|
static |
ADC3 Initialization Function.
- Parameters
-
None
- Return values
-
None
Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
Definition at line 652 of file main.c.


◆ MX_CAN1_Init()
|
static |
CAN1 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 767 of file main.c.


◆ MX_CAN2_Init()
|
static |
CAN2 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 832 of file main.c.


◆ MX_CAN3_Init()
|
static |
CAN3 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 897 of file main.c.


◆ MX_DAC_Init()
|
static |
DAC Initialization Function.
- Parameters
-
None
- Return values
-
None
DAC Initialization
DAC channel OUT1 config
DAC channel OUT2 config
Definition at line 934 of file main.c.


◆ MX_DMA_Init()
|
static |
Enable DMA controller clock
Definition at line 1284 of file main.c.

◆ MX_GPIO_Init()
|
static |
GPIO Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 1315 of file main.c.

◆ MX_I2C2_Init()
|
static |
I2C2 Initialization Function.
- Parameters
-
None
- Return values
-
None
Configure Analogue filter
Configure Digital filter
Definition at line 981 of file main.c.


◆ MX_I2C4_Init()
|
static |
I2C4 Initialization Function.
- Parameters
-
None
- Return values
-
None
Configure Analogue filter
Configure Digital filter
Definition at line 1029 of file main.c.


◆ MX_SPI4_Init()
|
static |
SPI4 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 1077 of file main.c.


◆ MX_SPI6_Init()
|
static |
SPI6 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 1117 of file main.c.


◆ MX_TIM1_Init()
|
static |
TIM1 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 1157 of file main.c.


◆ MX_TIM2_Init()
|
static |
TIM2 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 1204 of file main.c.


◆ MX_USART3_UART_Init()
|
static |
USART3 Initialization Function.
- Parameters
-
None
- Return values
-
None
Definition at line 1251 of file main.c.


◆ StartDefaultTask()
| void StartDefaultTask | ( | void * | argument | ) |
Function implementing the defaultTask thread.
- Parameters
-
argument Not used
- Return values
-
None
Definition at line 1515 of file main.c.

◆ SystemClock_Config()
| void SystemClock_Config | ( | void | ) |
System Clock Configuration.
- Return values
-
None
Configure LSE Drive Capability
Configure the main internal regulator output voltage
Initializes the RCC Oscillators according to the specified parameters in the RCC_OscInitTypeDef structure.
Initializes the CPU, AHB and APB buses clocks
Definition at line 390 of file main.c.


◆ vApplicationIdleHook()
| void vApplicationIdleHook | ( | void | ) |
◆ vApplicationMallocFailedHook()
| void vApplicationMallocFailedHook | ( | void | ) |
◆ vApplicationStackOverflowHook()
| void vApplicationStackOverflowHook | ( | TaskHandle_t | xTask, |
| char * | pcTaskName | ||
| ) |
◆ vApplicationTickHook()
| void vApplicationTickHook | ( | void | ) |
Variable Documentation
◆ adc1_buffer
| uint32_t adc1_buffer[ADC1_CHANNEL_SIZE] |
◆ adc2_buffer
| uint32_t adc2_buffer[ADC2_CHANNEL_SIZE] |
◆ adc3_buffer
| uint32_t adc3_buffer[ADC3_CHANNEL_SIZE] |
◆ dac1_buffer
| uint32_t dac1_buffer[DAC1_BUFFER_SIZE] |
◆ dac2_buffer
| uint32_t dac2_buffer[DAC2_BUFFER_SIZE] |
◆ defaultTask_attributes
| const osThreadAttr_t defaultTask_attributes |
◆ defaultTaskHandle
◆ digital_in_buffer
| uint8_t digital_in_buffer[NUM_DIGITAL_INPUTS] |
◆ digital_out_buffer
| uint8_t digital_out_buffer[NUM_DIGITAL_OUTPUTS] |