Include dependency graph for WheelSpeedTest.c:
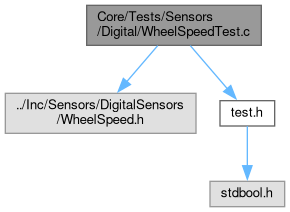
Go to the source code of this file.
Functions | |
| float | testTransferFunction (float radius, int numTeeth, int pulseCount, float timeInterval) |
| void | wheel_speed_main () |
Function Documentation
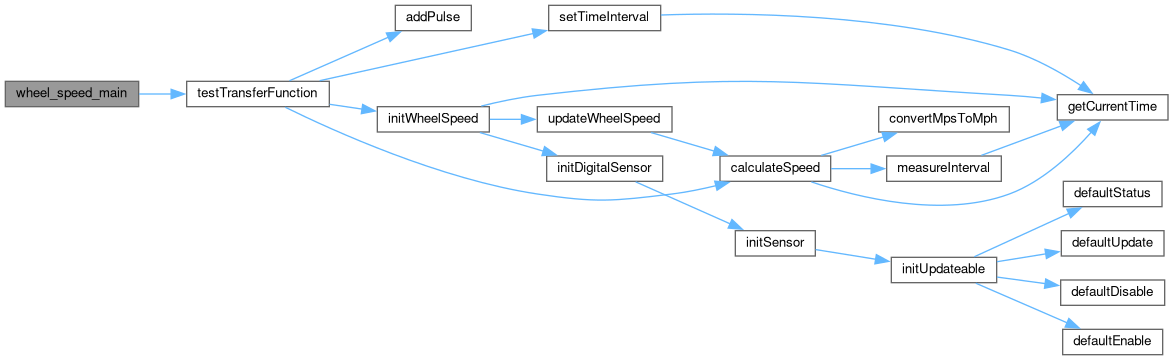
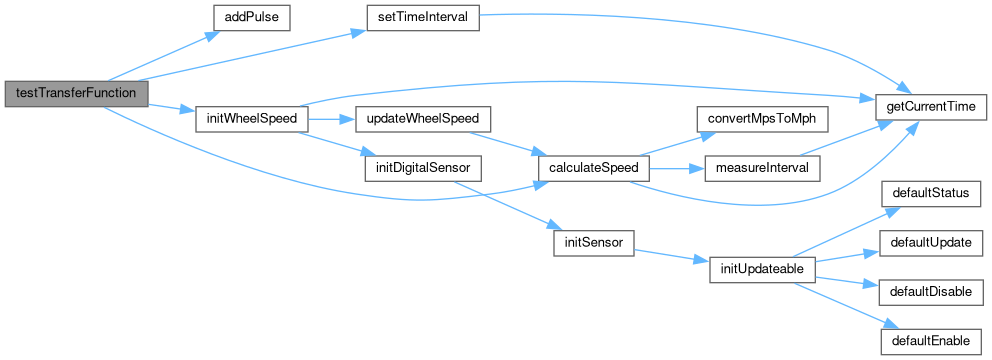
◆ testTransferFunction()
| float testTransferFunction | ( | float | radius, |
| int | numTeeth, | ||
| int | pulseCount, | ||
| float | timeInterval | ||
| ) |
Definition at line 4 of file WheelSpeedTest.c.
5 {
6 WheelSpeed wheelSpeed;
7 int wheelSpeedHz = 200;
8 initWheelSpeed(&wheelSpeed, wheelSpeedHz, 0, radius, numTeeth, 0);
9
10 addPulse(&wheelSpeed, pulseCount);
11 // Inverting time because get function relies on current time
12 setTimeInterval(&wheelSpeed, -timeInterval);
13
15}
void initWheelSpeed(WheelSpeed *ws, int hz, int port, float radius, int numTeeth, WHEEL_LOCATION location)
Initialization function for a wheel speed sensor.
Definition: WheelSpeed.c:13
Definition: WheelSpeed.h:7
Here is the call graph for this function:
Here is the caller graph for this function:

◆ wheel_speed_main()
| void wheel_speed_main | ( | ) |
Definition at line 17 of file WheelSpeedTest.c.
17 {
18 TEST(low_speed_1, {
20 "expected speed");
21 })
22
23 TEST(low_speed_2, {
25 "expected speed");
26 })
27
28 TEST(low_speed_3, {
30 "expected speed");
31 })
32
33 TEST(medium_speed_1, {
35 "speed", "expected speed");
36 })
37
38 TEST(medium_speed_2, {
40 "expected speed");
41 })
42
43 TEST(medium_speed_3, {
45 "expected speed");
46 })
47
48 TEST(high_speed_1, {
50 "speed", "expected speed");
51 })
52
53 TEST(high_speed_2, {
55 "speed", "expected speed");
56 })
57
58 TEST(high_speed_3, {
60 "expected speed");
61 })
62}
float testTransferFunction(float radius, int numTeeth, int pulseCount, float timeInterval)
Definition: WheelSpeedTest.c:4
Here is the call graph for this function: