#include "stm32f7xx_it.h"#include "../../../../Inc/Systems/Comms/Can/Can.h"#include "../../../../Inc/Systems/Comms/Can/DBCParser.h"#include "../../../../Inc/Utils/Common.h"#include "../../../../Inc/Utils/MessageFormat.h"#include <stdio.h>#include <string.h>#include <stdlib.h>#include <inttypes.h>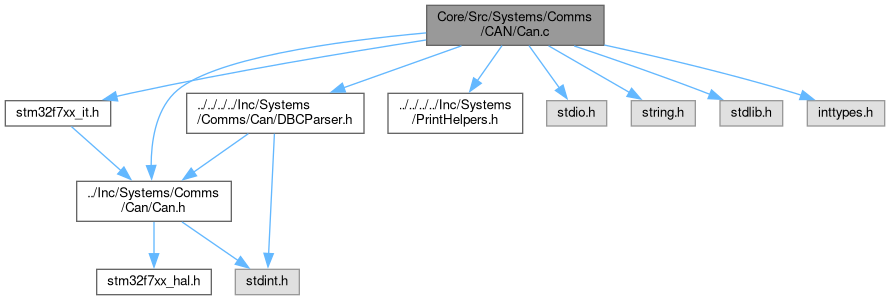
Go to the source code of this file.
Functions | |
| int | init_CANBus (CANBus bus) |
| Initializes the CANBus struct. More... | |
| int | load_dbc_file (CANBus bus, const unsigned char *filename) |
| Loads a DBC file into the CAN database. Makes the messages and signals and stores them in the list. More... | |
| int | add_message (CANBus bus, CAN_Message_Template message) |
| Adds a message to the CAN message list. More... | |
| int | add_message_lop (CANBus bus, int id, int dlc, int ide, int rtr, const char *name, const char *sender, int signal_count, CAN_Signal_Template *signals) |
| Adds a message to the CAN message list by passing in the individual message parameters hence "LOP" (List of Parameters) More... | |
| int | send_CAN_message (CANBus bus, CANProtocol protocol, uint32_t id, uint8_t *data, uint8_t len) |
| Sends a CAN message. More... | |
| void | receive_CAN_message (CAN_RxHeaderTypeDef *RxHeader, uint8_t *RxData, CANBus bus) |
| Receives a CAN message. More... | |
| void | parseMessage (CAN_MessageList *messages, CAN_Message *can_message) |
| Parses a CAN message. More... | |
| void | parseSignals (CAN_Message_Template *message, CAN_Message *can_message) |
| Parses signals in a CAN message. More... | |
| void | parseSignal (CAN_Signal_Template *signal, CAN_Signal *can_signal, CAN_Message *can_message) |
| Parses a CAN signal. More... | |
| void | print_CAN_Messages_Lists () |
| Prints the CAN message list. More... | |
Variables | |
| CAN_MessageList | can_messages [MAX_BUS] |
Function Documentation
◆ add_message()
| int add_message | ( | CANBus | bus, |
| CAN_Message_Template | message | ||
| ) |
Adds a message to the CAN message list.
- Parameters
-
bus The CAN bus to add the message to message The message to add
- Returns
- int 0 if the message was added successfully, -1 if the bus is invalid
Definition at line 49 of file Can.c.

◆ add_message_lop()
| int add_message_lop | ( | CANBus | bus, |
| int | id, | ||
| int | dlc, | ||
| int | ide, | ||
| int | rtr, | ||
| const char * | name, | ||
| const char * | sender, | ||
| int | signal_count, | ||
| CAN_Signal_Template * | signals | ||
| ) |
Adds a message to the CAN message list by passing in the individual message parameters hence "LOP" (List of Parameters)
- Parameters
-
bus The CAN bus to add the message to id The ID of the message dlc The Data Length Code of the message ide The Identifier Extension of the message rtr The Remote Transmission Request of the message name The name of the message sender The sender of the message signal_count The number of signals in the message signals The signals in the message
- Returns
- int 0 if the message was added successfully, -1 if the bus is invalid
Definition at line 56 of file Can.c.


◆ init_CANBus()
| int init_CANBus | ( | CANBus | bus | ) |

◆ load_dbc_file()
| int load_dbc_file | ( | CANBus | bus, |
| const unsigned char * | filename | ||
| ) |
Loads a DBC file into the CAN database. Makes the messages and signals and stores them in the list.
- Parameters
-
bus The CAN bus to load the DBC file into filename The name of the DBC file to load
- Returns
- int 0 if the DBC file was loaded successfully, -1 if the file could not be opened
Definition at line 26 of file Can.c.

◆ parseMessage()
| void parseMessage | ( | CAN_MessageList * | messages, |
| CAN_Message * | can_message | ||
| ) |
Parses a CAN message.
- Parameters
-
messages The CAN message list can_message The CAN message to parse
Definition at line 147 of file Can.c.


◆ parseSignal()
| void parseSignal | ( | CAN_Signal_Template * | signal, |
| CAN_Signal * | can_signal, | ||
| CAN_Message * | can_message | ||
| ) |
Parses a CAN signal.
- Parameters
-
signal The CAN signal template can_signal The CAN signal to parse can_message The CAN message to parse
Definition at line 172 of file Can.c.

◆ parseSignals()
| void parseSignals | ( | CAN_Message_Template * | message, |
| CAN_Message * | can_message | ||
| ) |
Parses signals in a CAN message.
- Parameters
-
message The CAN message template can_message The CAN message to parse
Definition at line 162 of file Can.c.


◆ print_CAN_Messages_Lists()
| void print_CAN_Messages_Lists | ( | ) |
Prints the CAN message list.
Definition at line 202 of file Can.c.

◆ receive_CAN_message()
| void receive_CAN_message | ( | CAN_RxHeaderTypeDef * | header, |
| uint8_t * | data, | ||
| CANBus | bus | ||
| ) |
Receives a CAN message.
- Parameters
-
RxHeader The CAN Rx header RxData The CAN Rx data bus The CAN bus to receive the message on
Definition at line 113 of file Can.c.


◆ send_CAN_message()
| int send_CAN_message | ( | CANBus | bus, |
| CANProtocol | protocol, | ||
| uint32_t | id, | ||
| uint8_t * | data, | ||
| uint8_t | len | ||
| ) |
Sends a CAN message.
- Parameters
-
bus The CAN bus to send the message on protocol The CAN protocol to use id The ID of the message data The data to send len The length of the data
- Returns
- int 0 if the message was sent successfully, -1 if the bus is invalid
Definition at line 80 of file Can.c.


Variable Documentation
◆ can_messages
| CAN_MessageList can_messages[MAX_BUS] |