Include dependency graph for TorqueControlActuatorTest.c:
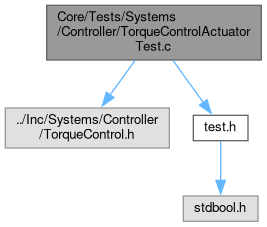
Go to the source code of this file.
Macros | |
| #define | MAX_TORQUE 100 |
| #define | TORQUE_DO(torque, desired) |
Functions | |
| void | torque_control_main () |
Macro Definition Documentation
◆ MAX_TORQUE
| #define MAX_TORQUE 100 |
Definition at line 4 of file TorqueControlActuatorTest.c.
◆ TORQUE_DO
| #define TORQUE_DO | ( | torque, | |
| desired | |||
| ) |
Value:
TorqueControl tc; \
initTorqueControl(&tc, 0, MAX_TORQUE); \
setActualTorque(&tc, torque); \
setDesiredTorque(&tc, desired); \
updateTorqueControl(&tc); \
TorqueStatus status = checkTorqueLimits(&tc);
Definition: TorqueControl.h:18
Definition at line 6 of file TorqueControlActuatorTest.c.
Function Documentation
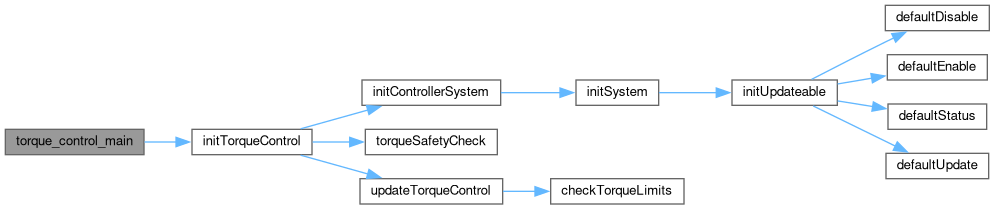
◆ torque_control_main()
| void torque_control_main | ( | ) |
Definition at line 14 of file TorqueControlActuatorTest.c.
14 {
15 TEST(torque_init, {
16 TorqueControl tc;
17 initTorqueControl(&tc, 0, 100);
19 })
20
21 TEST(update_normal, {
22 TORQUE_DO(75, 75)
24 })
25
26 TEST(update_below_desired, {
27 TORQUE_DO(93.5, 95)
29 })
30
31 TEST(update_above_desired, {
32 TORQUE_DO(98.5, 95)
34 })
35
36 TEST(update_over_limit, {
37 TORQUE_DO(101, 95)
39 })
40
41 TEST(update_negative_torque, {
42 TORQUE_DO(-10, 95)
44 })
45
46 TEST(update_sensor_error, {
47 TORQUE_DO(10, 80)
49 })
50}
void initTorqueControl(TorqueControl *tc, Apps *apps, int hz, float maxTorque)
Initializes the Torque Control Actuator with initial settings.
Definition: TorqueControl.c:6
Here is the call graph for this function: