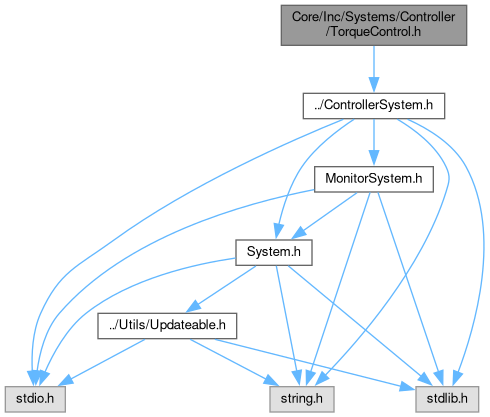
Include dependency graph for TorqueControl.h:
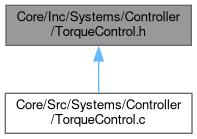
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | TorqueControl |
Enumerations | |
| enum | TorqueStatus { TORQUE_OK , TORQUE_RTD , TORQUE_LOW , TORQUE_OVER_LIMIT , TORQUE_UNDER_LIMIT , TORQUE_SENSOR_ERROR , TORQUE_BRAKE_FIGHT } |
Functions | |
| void | initTorqueControl (TorqueControl *tc, Apps *apps, int hz, float maxTorque) |
| Initializes the Torque Control Actuator with initial settings. More... | |
| int | startTorqueControl (TorqueControl *tc) |
| Starts the Torque Control Actuator. More... | |
| int | setDesiredTorque (ControllerSystem *controller) |
| Sets the desired torque for the Torque Control Actuator. More... | |
Enumeration Type Documentation
◆ TorqueStatus
| enum TorqueStatus |
| Enumerator | |
|---|---|
| TORQUE_OK | |
| TORQUE_RTD | |
| TORQUE_LOW | |
| TORQUE_OVER_LIMIT | |
| TORQUE_UNDER_LIMIT | |
| TORQUE_SENSOR_ERROR | |
| TORQUE_BRAKE_FIGHT | |
Definition at line 8 of file TorqueControl.h.
Function Documentation
◆ initTorqueControl()
| void initTorqueControl | ( | TorqueControl * | tc, |
| Apps * | apps, | ||
| int | hz, | ||
| float | maxTorque | ||
| ) |
Initializes the Torque Control Actuator with initial settings.
- Parameters
-
tc A pointer to the TorqueControl structure. hz Rate at which the sensor is called (in hz). maxTorque The maximum torque limit set for the system (in Nm).
Definition at line 6 of file TorqueControl.c.
6 {
8 tc->desiredTorque = 0;
9 tc->maxAllowedTorque = maxTorque;
10 tc->apps = apps;
11}
void initControllerSystem(ControllerSystem *controller, const char *name, int hz, ControllerType type, int(*updateController)(ControllerSystem *controller), void *child)
Initializes the Controller System with initial settings.
Definition: ControllerSystem.c:6
int setDesiredTorque(ControllerSystem *controller)
Sets the desired torque for the Torque Control Actuator.
Definition: TorqueControl.c:27
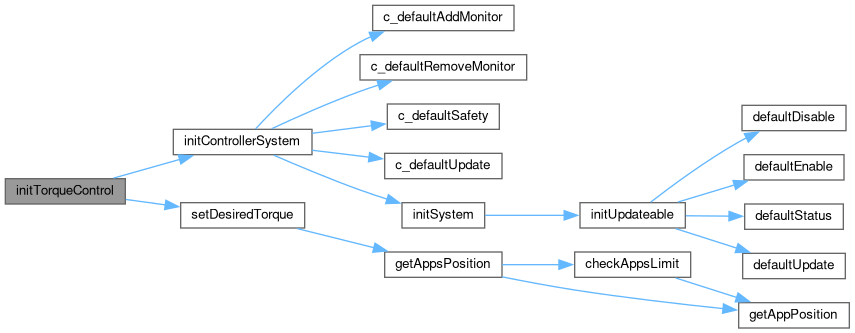
Here is the call graph for this function:
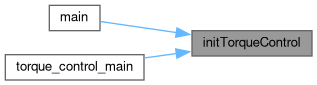
Here is the caller graph for this function:
◆ setDesiredTorque()
| int setDesiredTorque | ( | ControllerSystem * | controller | ) |
Sets the desired torque for the Torque Control Actuator.
- Parameters
-
controller A pointer to the ControllerSystem structure.
- Returns
- _SUCCESS if the desired torque was set, _FAILURE otherwise.
Definition at line 27 of file TorqueControl.c.
27 {
31
33 //printf("Desired torque exceeds the maximum allowed torque, stepping down to max\n");
34 torque = tc->maxAllowedTorque;
35 }
36
37 // Perform any desired mapping, i.e. fit to sigmoid function.
39 double s_curve = 1.0 / (1.0 + exp(-10 * (normalized - 0.5)));
42
43 #ifdef DEBUGn
44 //printf("Desired Torque: %f\r\n", tc->desiredTorque);
45 #endif
46
48}
Definition: TorqueControl.h:18
Here is the call graph for this function:

Here is the caller graph for this function:

◆ startTorqueControl()
| int startTorqueControl | ( | TorqueControl * | tc | ) |
Starts the Torque Control Actuator.
- Parameters
-
tc A pointer to the TorqueControl structure.
- Returns
- _SUCCESS if the actuator was started, _FAILURE otherwise.
Definition at line 13 of file TorqueControl.c.
13 {
15 //printf("Safety system not set for Torque Control\n");
17 }
19 //printf("Torque Control Actuator is not in a safe state\n");
21 }
25}
int(* safety)(struct ControllerSystem *controller)
Definition: ControllerSystem.h:35
Here is the caller graph for this function:
