: Contains the logic for the two app sensors. More...
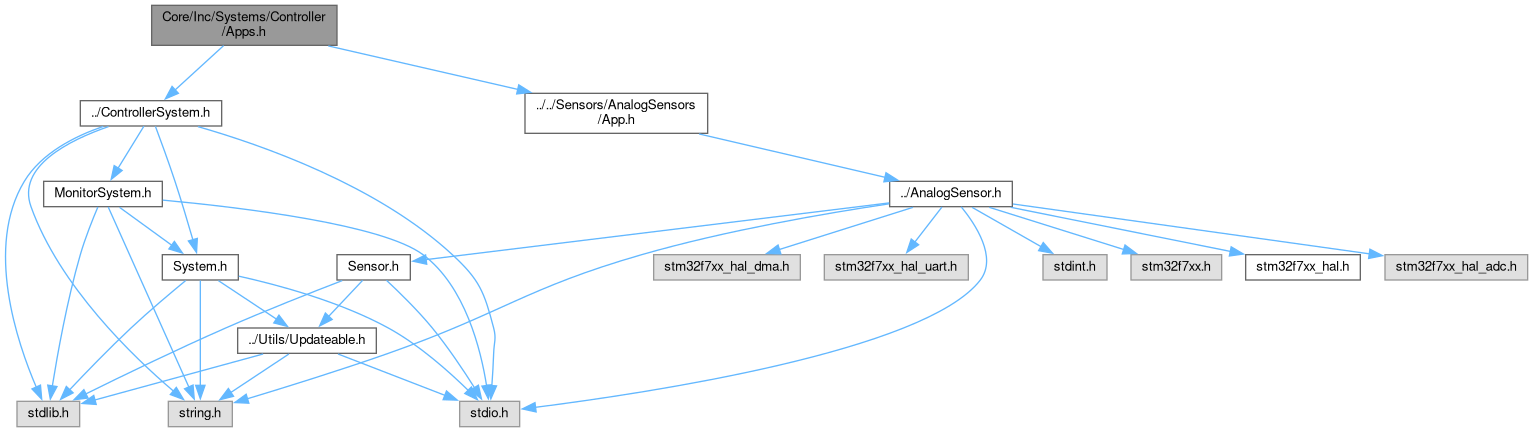
Include dependency graph for Apps.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | Apps |
Macros | |
| #define | APPS_DIFFERENCE 0.1 |
Enumerations | |
| enum | AppsStatus { APPS_OK , APPS_FAULT , APPS_LOW } |
Functions | |
| void | initApps (Apps *apps, int hz, int channel1, int channel2) |
| Initializes the APPs with the given frequency and channel. More... | |
| int | updateApps (ControllerSystem *controller) |
| Updates the APPS based on both sensor outputs. More... | |
| float | getAppsPosition (Apps *apps) |
| Averages app sensors to get pedal position. More... | |
Detailed Description
: Contains the logic for the two app sensors.
Definition in file Apps.h.
Macro Definition Documentation
◆ APPS_DIFFERENCE
Enumeration Type Documentation
◆ AppsStatus
| enum AppsStatus |
| Enumerator | |
|---|---|
| APPS_OK | |
| APPS_FAULT | |
| APPS_LOW | |
Function Documentation
◆ getAppsPosition()
| float getAppsPosition | ( | Apps * | apps | ) |
Averages app sensors to get pedal position.
- Parameters
-
apps Pointer to the APPS controller.
Definition at line 38 of file Apps.c.
38 {
40 return 0.0f;
41 }
42 checkAppsLimit(apps);
46 return fabs(pos1 + pos2) / 2;
47}
Here is the call graph for this function:

Here is the caller graph for this function:

◆ initApps()
| void initApps | ( | Apps * | apps, |
| int | hz, | ||
| int | channel1, | ||
| int | channel2 | ||
| ) |
Initializes the APPs with the given frequency and channel.
- Parameters
-
apps Pointer to the Apps structure to initialize. hz The frequency in Hertz at which the APP operates. channel1 The analog channel the first APP is connected to. channel2 The analog channel the second APP is connected to.
Definition at line 8 of file Apps.c.
8 {
10 // Allocate memory for the app instances
12 apps->app[0] = &app1;
13 apps->app[1] = &app2;
14
15 // Check if memory allocation was successful
17 return;
18 }
19
20 // Controller setup
25}
void initApp(App *app, int hz, int channel, char *name)
Initializes the APP with the given frequency and channel.
Definition: App.c:6
int updateApps(ControllerSystem *controller)
Updates the APPS based on both sensor outputs.
Definition: Apps.c:27
void initControllerSystem(ControllerSystem *controller, const char *name, int hz, ControllerType type, int(*updateController)(ControllerSystem *controller), void *child)
Initializes the Controller System with initial settings.
Definition: ControllerSystem.c:6
Here is the call graph for this function:
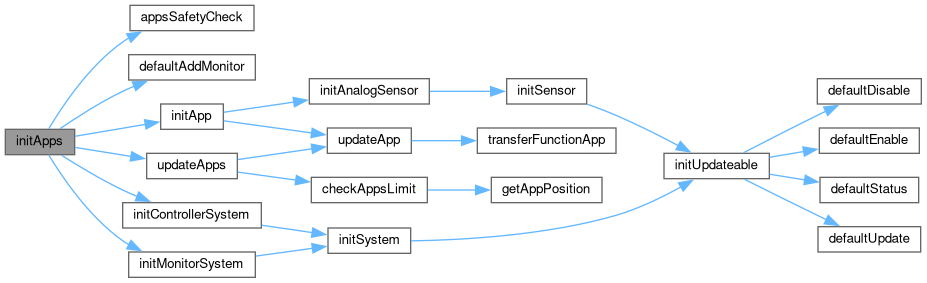
Here is the caller graph for this function:

◆ updateApps()
| int updateApps | ( | ControllerSystem * | controller | ) |
Updates the APPS based on both sensor outputs.
- Parameters
-
controller A pointer to the APPs ControllerSystem.
Definition at line 27 of file Apps.c.
27 {
31
32 // Set to computed
34
36}
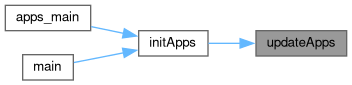
Here is the call graph for this function:
Here is the caller graph for this function: