#include "../../../Inc/Sensors/AnalogSensors/App.h"#include "../../../Inc/Utils/MessageFormat.h"#include <stdio.h>
Include dependency graph for App.c:
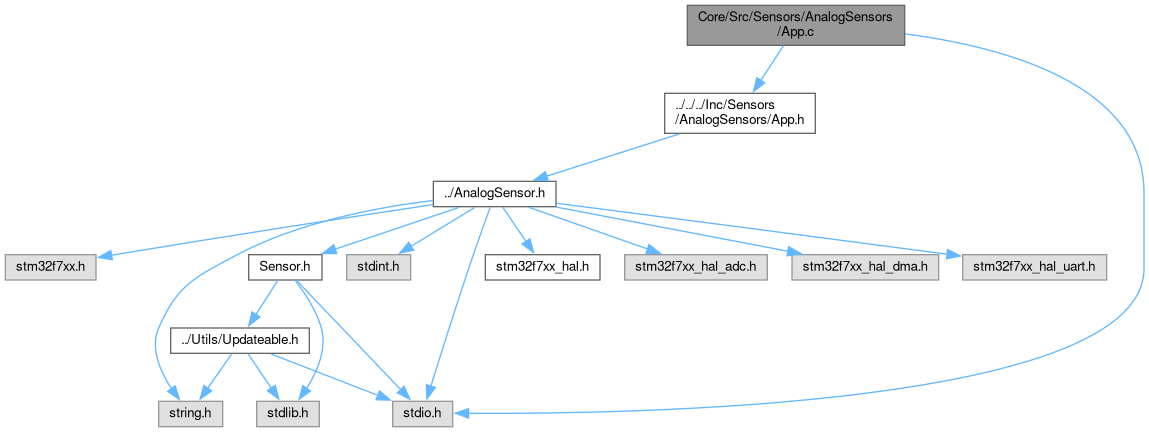
Go to the source code of this file.
Functions | |
| void | initApp (App *app, int hz, int channel, char *name) |
| Initializes the APP with the given frequency and channel. More... | |
| float | getAppPosition (App *app) |
| Gets the current position of the APP. More... | |
| void | updateApp (App *app) |
| Updates the APP data. More... | |
| float | transferFunctionApp (float rawVal) |
| Converts raw APP data to a meaningful position value. More... | |
Function Documentation
◆ getAppPosition()
| float getAppPosition | ( | App * | app | ) |

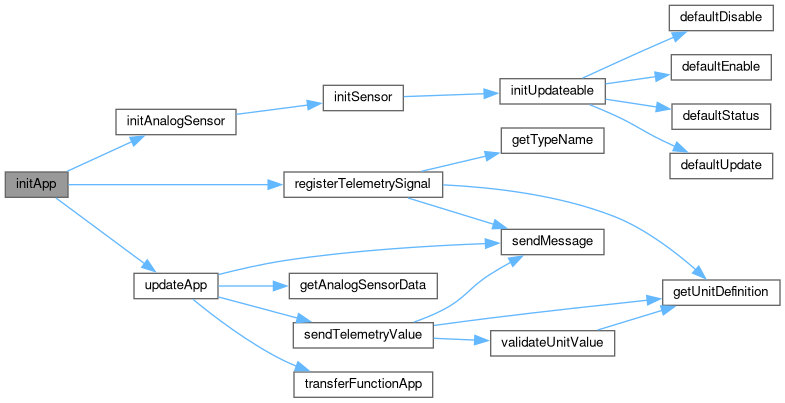
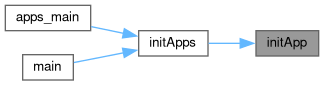
◆ initApp()
| void initApp | ( | App * | app, |
| int | hz, | ||
| int | channel, | ||
| char * | name | ||
| ) |
Initializes the APP with the given frequency and channel.
- Parameters
-
app Pointer to the App structure to initialize. hz The frequency in Hertz at which the APP operates. channel The analog channel the APP is connected to. name The name of the sensor (default is "App").
Definition at line 6 of file App.c.
6 {
8 app->position = 0;
10
11 // Register telemetry signal
12 app->telem_raw = registerTelemetrySignal(name, TELEMETRY_SENSOR, UNIT_VOLTS, 1000/hz, 0.4f, 4.7f);
13 app->telem_position = registerTelemetrySignal(name, TELEMETRY_SENSOR, UNIT_PERCENT, 1000/hz, 0.0f, 100.0f);
14
15}
void initAnalogSensor(AnalogSensor *analogSensor, const char *name, int hz, int channel, void *child)
Initializes an analog sensor and configures the corresponding GPIO pin.
Definition: AnalogSensor.c:42
TelemetrySignal * registerTelemetrySignal(const char *name, TelemetryType type, UnitId unit_id, uint32_t expected_rate_ms, float custom_min, float custom_max)
Definition: Telemetry.c:23
Here is the call graph for this function:
Here is the caller graph for this function:
◆ transferFunctionApp()
| float transferFunctionApp | ( | float | rawVal | ) |
Converts raw APP data to a meaningful position value.
- Parameters
-
rawVal The raw data from the APP.
- Returns
- The converted APP position value.
Definition at line 41 of file App.c.
41 {
42 // This is a +-45 degree sensor
43 if (rawVal < 0.5) {
44 return -1;
45 }
46 else if (rawVal > 4.5) {
47 return -2;
48 }
49 return (rawVal - 0.5)/4.0;
50}
Here is the caller graph for this function:

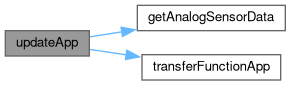
◆ updateApp()
| void updateApp | ( | App * | app | ) |
Updates the APP data.
- Parameters
-
app Pointer to the App structure to update.
Definition at line 21 of file App.c.
21 {
22 // FIXME: Implement APP connection with stm
24 // Send Telemetry float
27
28 // Send diagnostic info to the debugger
31 "APP reading below sensor minimum (%.3f V)", rawData);
34 "APP reading above sensor maximum (%.3f V)", rawData);
35 }
36
37 sendTelemetryValue(app->telem_position, app->position * 100); // Convert from 1-scale to percentage
38
39}
float getAnalogSensorData(AnalogSensor *sensor)
Retrieves analog sensor data for a specific channel.
Definition: AnalogSensor.c:89
float transferFunctionApp(float rawVal)
Converts raw APP data to a meaningful position value.
Definition: App.c:41
void sendMessage(const char *sender, MessageType type, const char *format,...)
Definition: MessageFormat.c:5
void sendTelemetryValue(TelemetrySignal *signal, float value)
Definition: Telemetry.c:59
Here is the call graph for this function:
Here is the caller graph for this function:
