Include dependency graph for AppsTest.c:
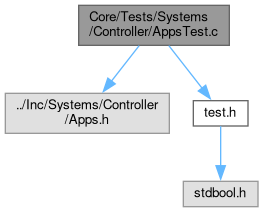
Go to the source code of this file.
Macros | |
| #define | APPS_DO(pos1, pos2) |
Functions | |
| void | apps_main () |
Macro Definition Documentation
◆ APPS_DO
| #define APPS_DO | ( | pos1, | |
| pos2 | |||
| ) |
Value:
Apps apps; \
initApps(&apps, 0, 0, 1); \
setAppPos(apps.app[0], pos1); \
setAppPos(apps.app[1], pos2); \
updateApps(&apps); \
float pos = getAppsPosition(&apps);
Definition at line 5 of file AppsTest.c.
Function Documentation
◆ apps_main()
| void apps_main | ( | ) |
Definition at line 13 of file AppsTest.c.
13 {
14 TEST(apps_init, {
15 Apps apps;
16 initApps(&apps, 0, 0, 1);
18 })
19
20 TEST(normal_operation_0, {
21 APPS_DO(0, 0)
23 ASSERT_EQ(pos, 0, "position", "expected position");
24 })
25
26 TEST(normal_operation_50, {
27 APPS_DO(50, 50)
29 ASSERT_EQ(pos, 50, "position", "expected position");
30 })
31
32 TEST(normal_operation_100, {
33 APPS_DO(100, 100)
35 ASSERT_EQ(pos, 100, "position", "expected position");
36 })
37
38 TEST(normal_operation_50_60, {
39 APPS_DO(50, 60);
42 })
43
44 TEST(normal_operation_55_56, {
45 APPS_DO(55, 56);
48 })
49
50 TEST(edge_difference_0_10, {
51 APPS_DO(0, 10);
54 })
55
56 TEST(edge_difference_50_60, {
57 APPS_DO(50, 60);
60 })
61
62 TEST(edge_difference_90_100, {
63 APPS_DO(90, 100);
66 })
67
68 TEST(edge_difference_0_1001, {
69 APPS_DO(0, 10.01);
72 })
73
74 TEST(edge_difference_50_61, {
75 APPS_DO(50, 51);
78 })
79
80 TEST(edge_difference_0_100, {
81 APPS_DO(0, 100);
84 })
85
86 TEST(sensor_1_under, {
87 APPS_DO(-1, 50);
90 })
91
92 TEST(sensor_1_over, {
93 APPS_DO(101, 50);
96 })
97
98 TEST(sensor_2_under, {
99 APPS_DO(50, -1);
102 })
103
104 TEST(sensor_2_over, {
105 APPS_DO(50, 101);
108 })
109
110 TEST(sensors_under, {
111 APPS_DO(-1, -1);
114 })
115
116 TEST(sensors_over, {
117 APPS_DO(101, 101);
120 })
121}
void initApps(Apps *apps, int hz, int channel1, int channel2)
Initializes the APPs with the given frequency and channel.
Definition: Apps.c:8
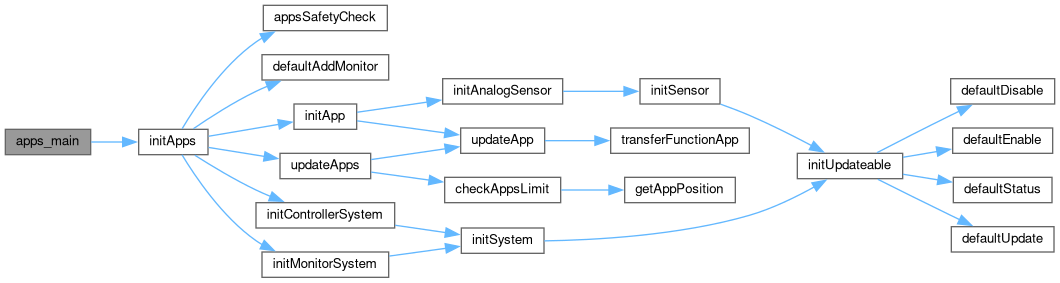
Here is the call graph for this function: