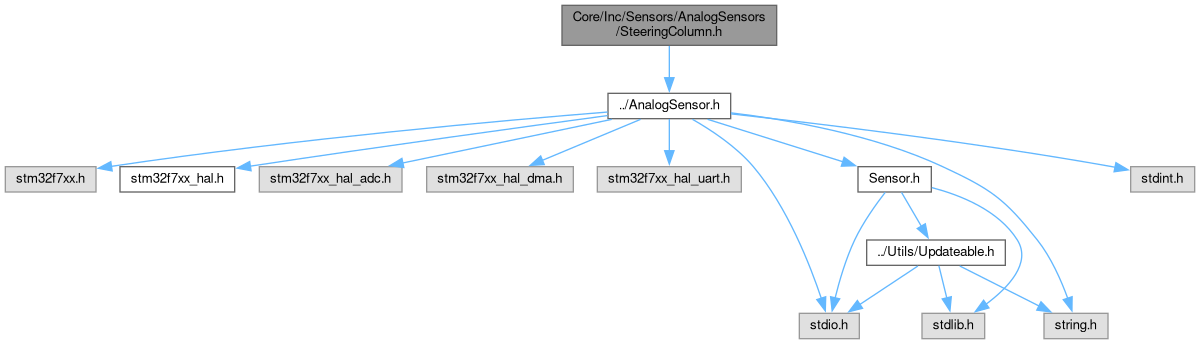
#include "../AnalogSensor.h"
Include dependency graph for SteeringColumn.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | SteeringColumn |
Functions | |
| void | initSteeringColumn (SteeringColumn *steeringColumn, int hz, int channel, float zeroOffset) |
| Initializes the SteeringColumn sensor with the given frequency, channel, and zero offset. More... | |
| float | getSteeringColumnRotationAngle (SteeringColumn *steeringColumn) |
| Gets the current rotation angle of the steering column. More... | |
| int | updateSteeringColumn (SteeringColumn *steeringColumn) |
| Updates the SteeringColumn data. More... | |
| float | transferFunctionSteeringColumn (float rawVal) |
| Converts raw steering column data to a meaningful rotation angle. More... | |
Function Documentation
◆ getSteeringColumnRotationAngle()
| float getSteeringColumnRotationAngle | ( | SteeringColumn * | steeringColumn | ) |
Gets the current rotation angle of the steering column.
- Parameters
-
steeringColumn Pointer to the SteeringColumn structure to query.
- Returns
- The current rotation angle of the steering column.
Definition at line 13 of file SteeringColumn.c.
13 {
15}
◆ initSteeringColumn()
| void initSteeringColumn | ( | SteeringColumn * | steeringColumn, |
| int | hz, | ||
| int | channel, | ||
| float | zeroOffset | ||
| ) |
Initializes the SteeringColumn sensor with the given frequency, channel, and zero offset.
- Parameters
-
steeringColumn Pointer to the SteeringColumn structure to initialize. hz The frequency in Hertz at which the sensor operates. channel The analog channel the sensor is connected to. zeroOffset The zero offset value for the steering column.
Definition at line 6 of file SteeringColumn.c.
6 {
8 steeringColumn->rotation_angle = -1;
9 steeringColumn->zero_offset = zeroOffset;
11}
void initAnalogSensor(AnalogSensor *analogSensor, const char *name, int hz, int channel, void *child)
Initializes an analog sensor and configures the corresponding GPIO pin.
Definition: AnalogSensor.c:42
int updateSteeringColumn(SteeringColumn *steeringColumn)
Updates the SteeringColumn data.
Definition: SteeringColumn.c:17
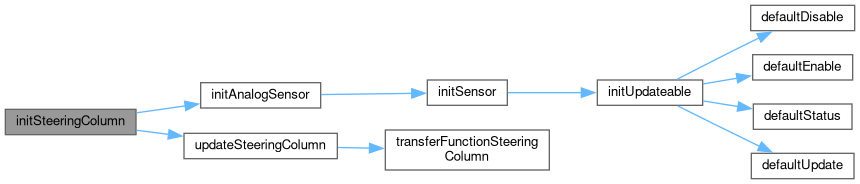
Here is the call graph for this function:
◆ transferFunctionSteeringColumn()
| float transferFunctionSteeringColumn | ( | float | rawVal | ) |
Converts raw steering column data to a meaningful rotation angle.
- Parameters
-
rawVal The raw data from the steering column sensor.
- Returns
- The converted rotation angle.
Definition at line 32 of file SteeringColumn.c.
32 {
33 // Placeholder for actual transfer function
34 //printf("Implement SteeringColumn::transfer_function\n");
35 return rawVal;
36}
Here is the caller graph for this function:

◆ updateSteeringColumn()
| int updateSteeringColumn | ( | SteeringColumn * | steeringColumn | ) |
Updates the SteeringColumn data.
- Parameters
-
steeringColumn Pointer to the SteeringColumn structure to update.
- Returns
- _SUCCESS or _FAILURE.
Definition at line 17 of file SteeringColumn.c.
17 {
18 // Check if the pointer is null
19 if (steeringColumn == NULL) {
20 //printf(stderr, "Error: Null pointer passed to updateSteeringColumn\n");
22 }
23
24 float rawData = 0.0f; // This should come from sensor read function or simulation
25 //printf("Implement SteeringColumn Update.\n");
26 steeringColumn->rotation_angle
28
30}
float transferFunctionSteeringColumn(float rawVal)
Converts raw steering column data to a meaningful rotation angle.
Definition: SteeringColumn.c:32
Here is the call graph for this function:

Here is the caller graph for this function:
