#include "../../../Inc/Sensors/DigitalSensors/WheelSpeed.h"#include "../../../Inc/Utils/Conversions.h"#include "../../../Inc/Utils/TimeUtils.h"#include "../../../Inc/Utils/Common.h"#include <stdio.h>#include <math.h>
Include dependency graph for WheelSpeed.c:
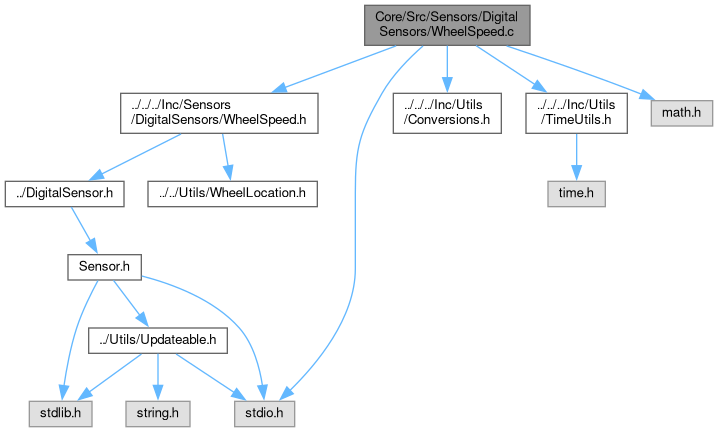
Go to the source code of this file.
Macros | |
| #define | M_PI 3.14159265358979323846 |
Functions | |
| void | initWheelSpeed (WheelSpeed *ws, int hz, int port, float radius, int numTeeth, WHEEL_LOCATION location) |
| Initialization function for a wheel speed sensor. More... | |
| float | calculateSpeed (WheelSpeed *ws) |
| Translates data to speed in mph. More... | |
| int | updateWheelSpeed (Updateable *updateable) |
| Updated the speed var in this sensor. More... | |
| void | setTimeInterval (WheelSpeed *ws, float interval) |
| Set time interval. More... | |
| void | addPulse (WheelSpeed *ws, int num) |
| Add pulses to sensor;. More... | |
Macro Definition Documentation
◆ M_PI
| #define M_PI 3.14159265358979323846 |
Definition at line 10 of file WheelSpeed.c.
Function Documentation
◆ addPulse()
| void addPulse | ( | WheelSpeed * | wf, |
| int | num | ||
| ) |
Add pulses to sensor;.
- Note
- For testing and debugging.
- Parameters
-
ws A pointer to the WheelSpeed structure. num Number of pulses to add.
Definition at line 76 of file WheelSpeed.c.
Here is the caller graph for this function:

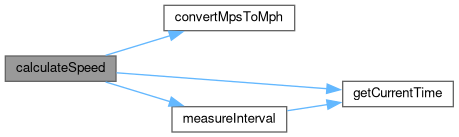
◆ calculateSpeed()
| float calculateSpeed | ( | WheelSpeed * | ws | ) |
Translates data to speed in mph.
- Parameters
-
ws A pointer to the WheelSpeed structure.
- Returns
- The speed in miles per hour.
Definition at line 25 of file WheelSpeed.c.
25 {
26 // Check if the pointer is null
27 if (ws == NULL) {
28 //printf(stderr, "Error: Null pointer passed to calculateSpeed\n");
29 return -1; // Or handle the error as appropriate
30 }
31
36
37 // Reset pulse count and elapsed time for the next measurement interval
39 ws->pulses = 0;
40
41 // Verify inputs
42 if (numTeeth <= 0 || radius <= 0.0f || pulses <= 0 || delta <= 0.0) {
43 //printf("Error: Invalid argument. "
44 // "NumTeeth = %d, Radius = %.2f, Pulses = %d, Time Delta = %.2f\n",
45 // numTeeth, radius, pulses, delta);
46 return 0.0f;
47 }
48
49 // Calculations
51 float distancePerPulse = circumference / numTeeth;
52 float speedMetersPerSecond = (distancePerPulse * pulses) / delta;
54
55 return speed;
56}
double measureInterval(double lastIntervalTime)
Measures the time interval since the last recorded time.
Definition: TimeUtils.c:7
Here is the call graph for this function:
Here is the caller graph for this function:

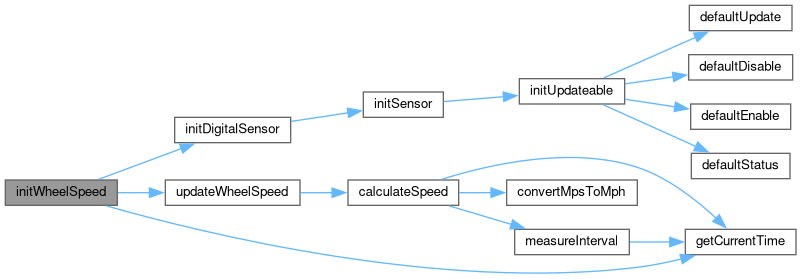
◆ initWheelSpeed()
| void initWheelSpeed | ( | WheelSpeed * | ws, |
| int | hz, | ||
| int | port, | ||
| float | radius, | ||
| int | numTeeth, | ||
| WHEEL_LOCATION | location | ||
| ) |
Initialization function for a wheel speed sensor.
- Parameters
-
ws A pointer to the WheelSpeed structure. @pram hz Rate at which the sensor is called (in hz). @pram port Location of sensor. @pram radius Radius of wheel (in mm). @pram numTeeth Number of teeth on reluctor wheel. @pram location Location of sensor on car.
Definition at line 13 of file WheelSpeed.c.
14 {
17 ws->radius = radius;
18 ws->wheel_location = location;
19 ws->numTeeth = numTeeth;
20 ws->pulses = 0;
21 ws->speed = 0.0f;
23}
void initDigitalSensor(DigitalSensor *digitalsensor, const char *name, int hz, int port, void *child)
Initializes a digital sensor with the given parameters.
Definition: DigitalSensor.c:3
int updateWheelSpeed(Updateable *updateable)
Updated the speed var in this sensor.
Definition: WheelSpeed.c:58
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setTimeInterval()
| void setTimeInterval | ( | WheelSpeed * | ws, |
| float | interval | ||
| ) |
Set time interval.
- Note
- For testing and debugging.
- Parameters
-
ws A pointer to the WheelSpeed structure. interval Time interval to set.
Definition at line 72 of file WheelSpeed.c.
Here is the call graph for this function:

Here is the caller graph for this function:

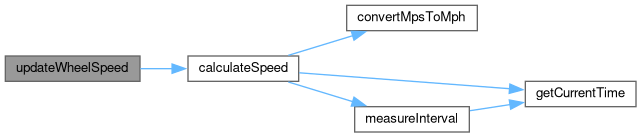
◆ updateWheelSpeed()
| int updateWheelSpeed | ( | Updateable * | updateable | ) |
Updated the speed var in this sensor.
- Parameters
-
updateable A pointer to the updateable structure.
- Returns
- _SUCCESS if the speed was updated, _FAILURE otherwise.
Definition at line 58 of file WheelSpeed.c.
58 {
59 // Cast the updateable pointer to a wheel speed sensor
63
66 //printf("Error: Speed calculation failed\n");
68 }
70}
Definition: DigitalSensor.h:9
Definition: Sensor.h:14
Definition: WheelSpeed.h:7
Here is the call graph for this function:
Here is the caller graph for this function:
