#include "../ControllerSystem.h"#include "../../../Inc/Outputs/DigitalOutput.h"#include "../../Sensors/AnalogSensors/BrakePressure.h"#include "../../Sensors/AnalogSensors/Temperature.h"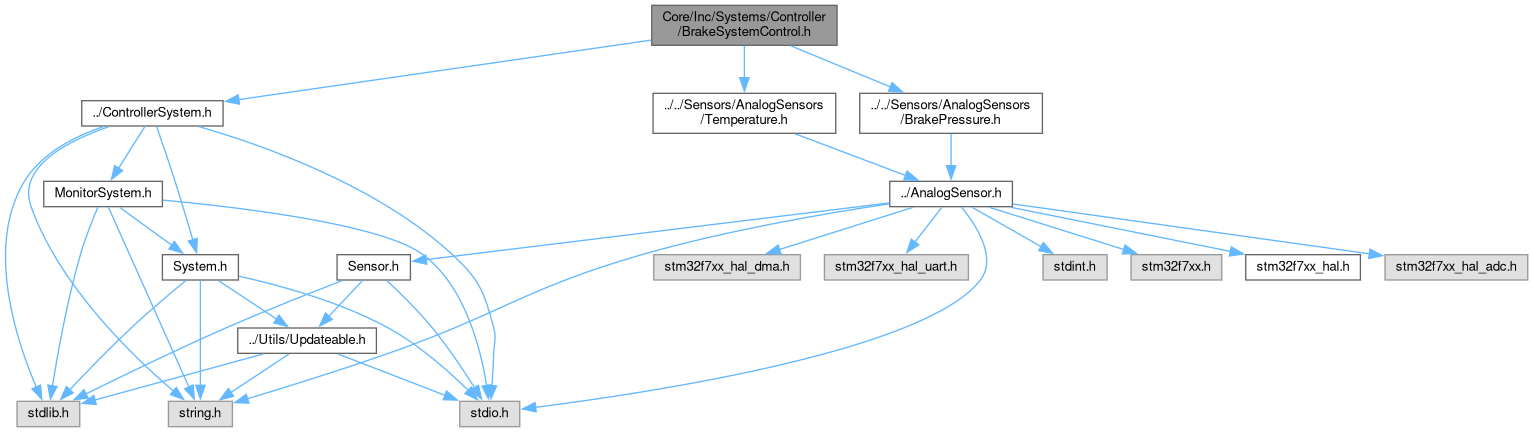
Go to the source code of this file.
Classes | |
| struct | BrakeSystemControl |
Enumerations | |
| enum | BrakeSystemStatus { BRAKES_OK , PRESSURE_UNDER_LIMIT , PRESSURE_OVER_LIMIT , PRESSURE_SENSOR_ERROR , TEMPERATURE_OVER_LIMIT , TEMPERATURE_SENSOR_ERROR } |
Functions | |
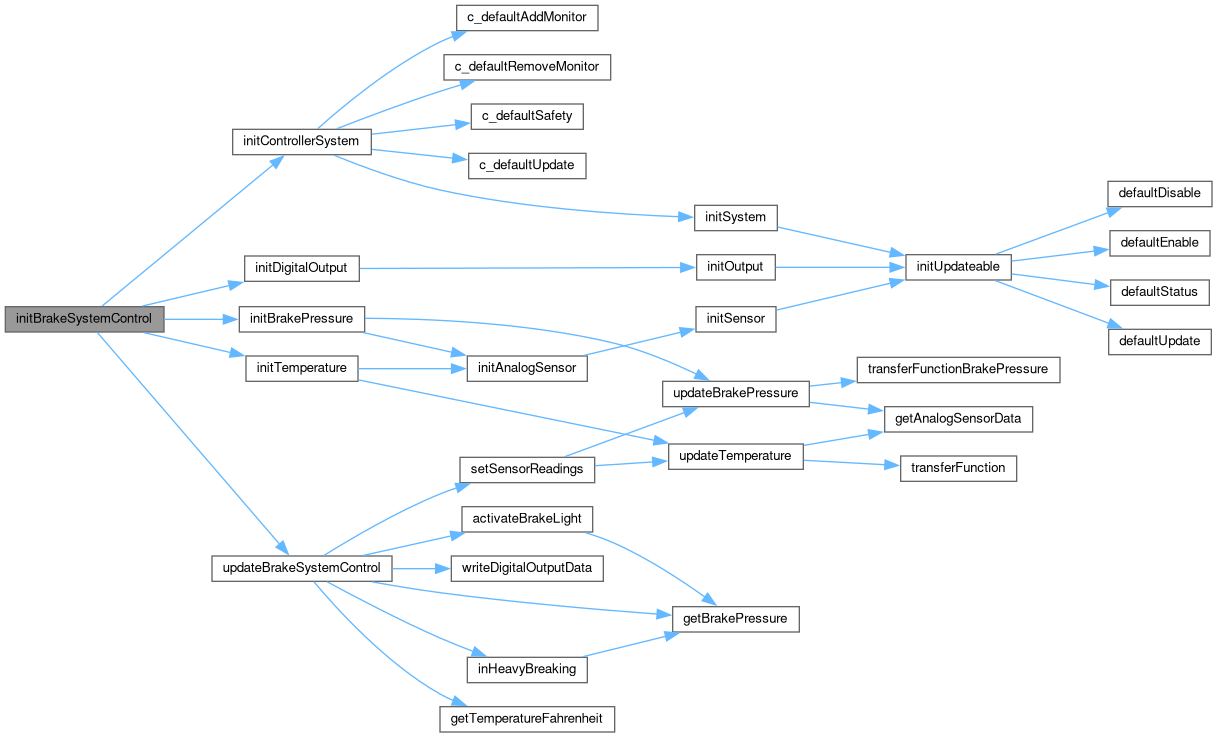
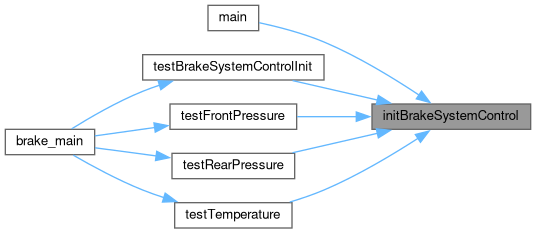
| void | initBrakeSystemControl (BrakeSystemControl *bsc, int hz, int maxTemp, int brakeLightActivationPoint, int heavyBrakingActivationPoint, int fbp_channel, int rbp_channel, int temp_channel, int light_port) |
| Initializes the Braking System with initial settings. More... | |
| int | startBrakeSystemControl (BrakeSystemControl *bsc) |
| Starts the Brake System Controller. More... | |
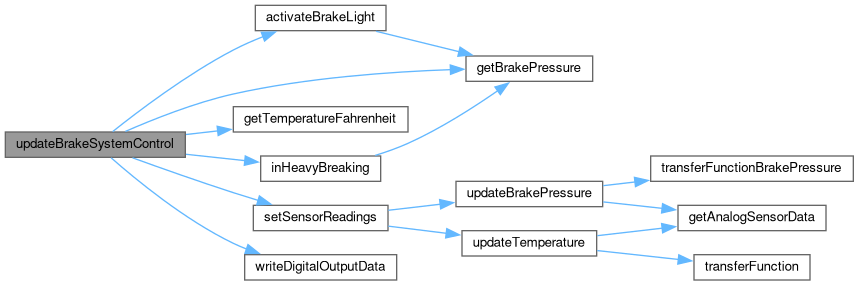
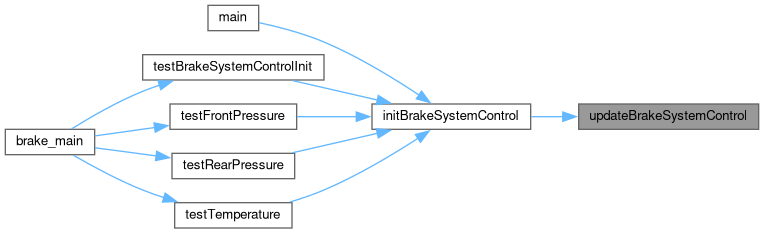
| int | updateBrakeSystemControl (ControllerSystem *controller) |
| Updates the Brake System Controller. More... | |
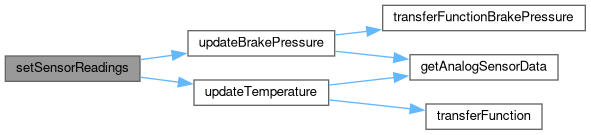
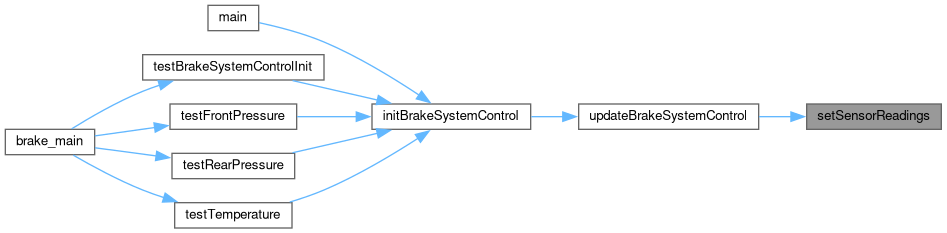
| void | setSensorReadings (BrakeSystemControl *bsc) |
| Updates BrakeSystemStatus with current sensor data. More... | |
| void | activateBrakeLight (BrakeSystemControl *bsc) |
| Checks whether the line pressure is higher than the activation point specified by the user. More... | |
| void | inHeavyBreaking (BrakeSystemControl *bsc) |
| Checks whether the line pressure is higher than the activation point specified by the user. More... | |
| BrakeSystemStatus | checkSensorLimits (BrakeSystemControl *bsc) |
| Checks if the brake system is within the defined limits and desired ranges. More... | |
| int | brakeSafteyCheck (void *bsc) |
| Checks the saftey of the braking system. More... | |
| void | setFrontPressure (BrakeSystemControl *bsc, float pressure) |
| void | setRearPressure (BrakeSystemControl *bsc, float pressure) |
| void | setTemperature (BrakeSystemControl *bsc, float temperature) |
Enumeration Type Documentation
◆ BrakeSystemStatus
| enum BrakeSystemStatus |
| Enumerator | |
|---|---|
| BRAKES_OK | |
| PRESSURE_UNDER_LIMIT | |
| PRESSURE_OVER_LIMIT | |
| PRESSURE_SENSOR_ERROR | |
| TEMPERATURE_OVER_LIMIT | |
| TEMPERATURE_SENSOR_ERROR | |
Definition at line 9 of file BrakeSystemControl.h.
Function Documentation
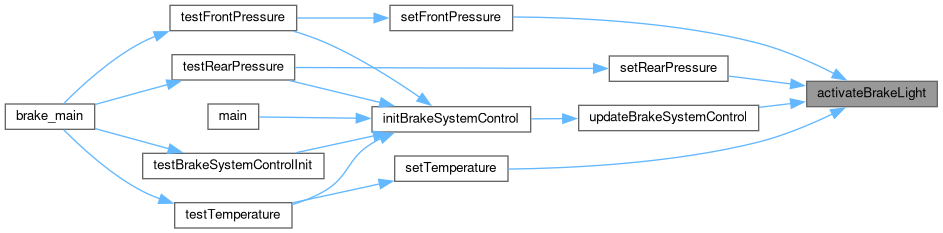
◆ activateBrakeLight()
| void activateBrakeLight | ( | BrakeSystemControl * | bsc | ) |
Checks whether the line pressure is higher than the activation point specified by the user.
- Parameters
-
bsc A pointer to the BrakeControl structure.
Definition at line 71 of file BrakeSystemControl.c.

◆ brakeSafteyCheck()
| int brakeSafteyCheck | ( | void * | bsc | ) |
Checks the saftey of the braking system.
- Parameters
-
bsc A pointer to the BrakeControl structure.
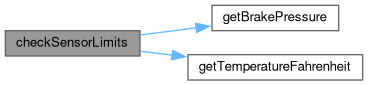
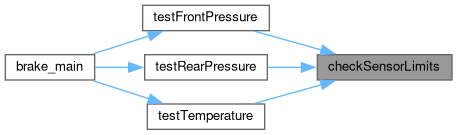
◆ checkSensorLimits()
| BrakeSystemStatus checkSensorLimits | ( | BrakeSystemControl * | bsc | ) |
Checks if the brake system is within the defined limits and desired ranges.
- Parameters
-
bsc A pointer to the BrakeControl structure.
Definition at line 95 of file BrakeSystemControl.c.
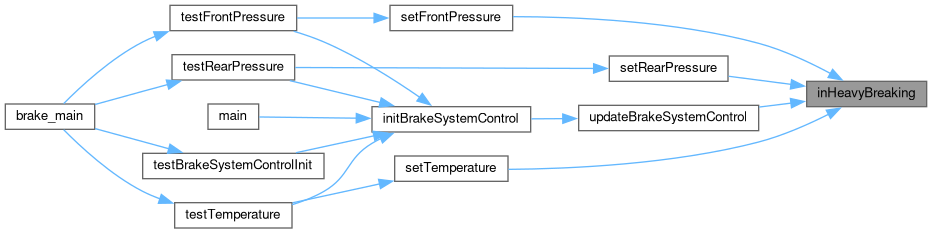
◆ inHeavyBreaking()
| void inHeavyBreaking | ( | BrakeSystemControl * | bsc | ) |
Checks whether the line pressure is higher than the activation point specified by the user.
- Parameters
-
bsc A pointer to the BrakeControl structure.
Definition at line 86 of file BrakeSystemControl.c.

◆ initBrakeSystemControl()
| void initBrakeSystemControl | ( | BrakeSystemControl * | bsc, |
| int | hz, | ||
| int | maxTemp, | ||
| int | brakeLightActivationPoint, | ||
| int | heavyBrakingActivationPoint, | ||
| int | fbp_channel, | ||
| int | rbp_channel, | ||
| int | temp_channel, | ||
| int | light_port | ||
| ) |
Initializes the Braking System with initial settings.
- Parameters
-
bsc A pointer to the BrakeControl structure. hz Rate at which the sensorors are called (in hz). maxTemp The maximum temperature limit set for the system (in farenheight). brakeLightActivationPoint At what voltage the brake light will activate. heavyBrakingActivationPoint At what voltage the system recognises "heavy braking". fbp_channel The channel number for the front brake pressure sensor rbp_channel The channel number for the rear brake pressure sensor temp_channel The channel number for the temperature sensor light_port The port number for the brake light
Definition at line 7 of file BrakeSystemControl.c.
◆ setFrontPressure()
| void setFrontPressure | ( | BrakeSystemControl * | bsc, |
| float | pressure | ||
| ) |
Definition at line 118 of file BrakeSystemControl.c.


◆ setRearPressure()
| void setRearPressure | ( | BrakeSystemControl * | bsc, |
| float | pressure | ||
| ) |
Definition at line 124 of file BrakeSystemControl.c.


◆ setSensorReadings()
| void setSensorReadings | ( | BrakeSystemControl * | bsc | ) |
Updates BrakeSystemStatus with current sensor data.
- Parameters
-
bsc A pointer to the BrakeControl structure.
Definition at line 65 of file BrakeSystemControl.c.
◆ setTemperature()
| void setTemperature | ( | BrakeSystemControl * | bsc, |
| float | temperature | ||
| ) |
Definition at line 130 of file BrakeSystemControl.c.


◆ startBrakeSystemControl()
| int startBrakeSystemControl | ( | BrakeSystemControl * | bsc | ) |
Starts the Brake System Controller.
- Parameters
-
bsc A pointer to the BrakeControl structure.
Definition at line 35 of file BrakeSystemControl.c.

◆ updateBrakeSystemControl()
| int updateBrakeSystemControl | ( | ControllerSystem * | controller | ) |
Updates the Brake System Controller.
- Parameters
-
controller A pointer to the BrakeControl ControllerSystem.
Definition at line 49 of file BrakeSystemControl.c.