#include "../../Inc/Utils/Telemetry.h"#include "../../Inc/Utils/MessageFormat.h"#include "../../Inc/Utils/Common.h"#include <string.h>
Include dependency graph for Telemetry.c:
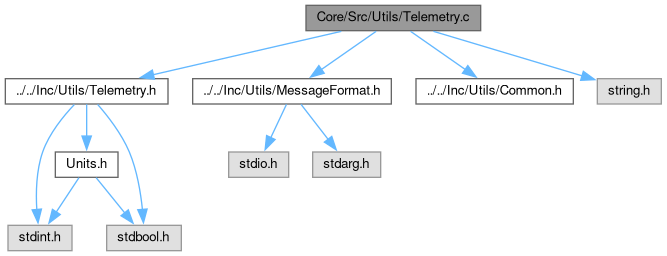
Go to the source code of this file.
Macros | |
| #define | MAX_TELEMETRY_SIGNALS 100 |
Functions | |
| void | initTelemetry (void) |
| TelemetrySignal * | registerTelemetrySignal (const char *name, TelemetryType type, UnitId unit_id, uint32_t expected_rate_ms, float custom_min, float custom_max) |
| void | sendTelemetryValue (TelemetrySignal *signal, float value) |
| void | checkTelemetryHealth (void) |
| void | handleTelemetryConfigRequest (void) |
| const char * | getCategoryName (UnitCategory category) |
| const char * | getTypeName (TelemetryType type) |
| void | sendCANTelemetryData (TelemetrySignal *signal, uint32_t can_id, uint8_t *data, uint8_t dlc) |
Variables | |
| static TelemetrySignal | signals [MAX_TELEMETRY_SIGNALS] |
| static uint16_t | num_signals = 0 |
| static bool | telemetry_initialized = false |
Macro Definition Documentation
◆ MAX_TELEMETRY_SIGNALS
| #define MAX_TELEMETRY_SIGNALS 100 |
Definition at line 6 of file Telemetry.c.
Function Documentation
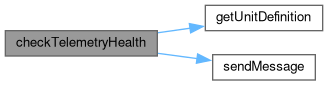
◆ checkTelemetryHealth()
| void checkTelemetryHealth | ( | void | ) |
Definition at line 111 of file Telemetry.c.
111 {
112 uint32_t now = HAL_GetTick();
113
117
118 uint32_t time_since_update = now - sig->last_update;
119 uint32_t stale_threshold = sig->expected_rate_ms * 3;
120
121 if (time_since_update > stale_threshold) {
124 "Signal stale: %s (last update %dms ago, expected every %dms)",
126 }
127 }
128}
void sendMessage(const char *sender, MessageType type, const char *format,...)
Definition: MessageFormat.c:5
Definition: Telemetry.h:17
Definition: Units.h:30
Here is the call graph for this function:
◆ getCategoryName()
| const char * getCategoryName | ( | UnitCategory | category | ) |
Definition at line 161 of file Telemetry.c.
161 {
162 switch (category) {
172 default: return "Other";
173 }
174}
Here is the caller graph for this function:

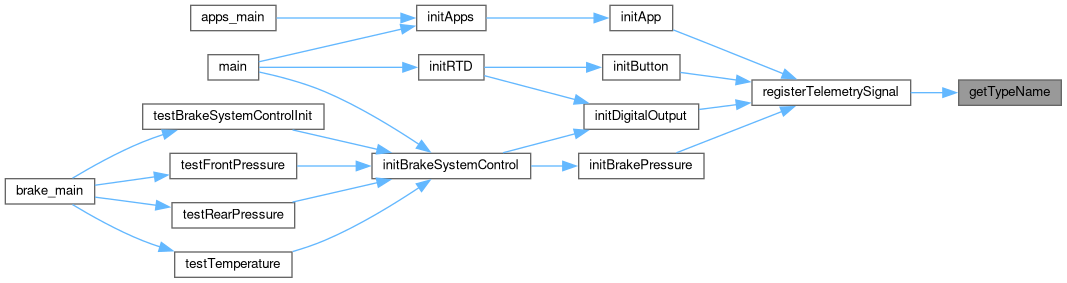
◆ getTypeName()
| const char * getTypeName | ( | TelemetryType | type | ) |
Definition at line 177 of file Telemetry.c.
177 {
178 switch (type) {
185 default: return "UNKNOWN";
186 }
187}
Here is the caller graph for this function:
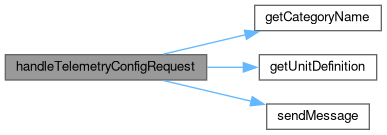
◆ handleTelemetryConfigRequest()
| void handleTelemetryConfigRequest | ( | void | ) |
Definition at line 130 of file Telemetry.c.
130 {
132
133 // Send total count first
135
136 // Send each signal configuration
140
141 // Send comprehensive configuration
143 "Signal:%s;Unit:%s;Category:%s;Type:%d;Rate:%d;Min:%.2f;Max:%.2f;Decimals:%d;AbsMin:%.2f;AbsMax:%.2f",
144 sig->name,
145 unit->symbol,
147 unit->data_type,
148 sig->expected_rate_ms,
149 sig->custom_min,
150 sig->custom_max,
151 unit->decimal_places,
152 unit->absolute_min,
153 unit->absolute_max);
154 }
155
156 // Send end marker
158}
Here is the call graph for this function:
Here is the caller graph for this function:

◆ initTelemetry()
| void initTelemetry | ( | void | ) |
Definition at line 12 of file Telemetry.c.
Here is the call graph for this function:

Here is the caller graph for this function:

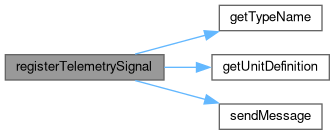
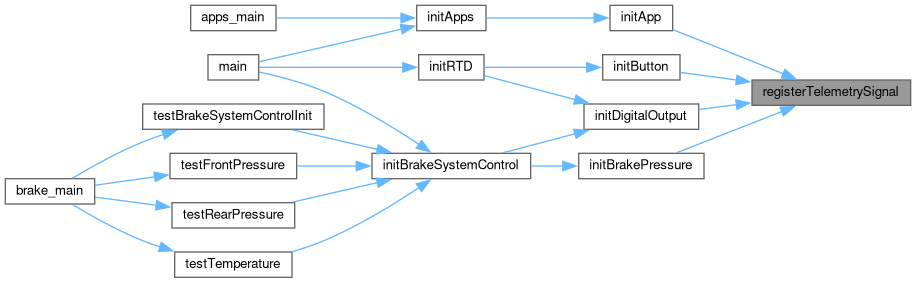
◆ registerTelemetrySignal()
| TelemetrySignal * registerTelemetrySignal | ( | const char * | name, |
| TelemetryType | type, | ||
| UnitId | unit_id, | ||
| uint32_t | expected_rate_ms, | ||
| float | custom_min, | ||
| float | custom_max | ||
| ) |
Definition at line 23 of file Telemetry.c.
25 {
27 return NULL;
28 }
29
32
35 sig->type = type;
36 sig->unit_id = unit_id;
37 sig->expected_rate_ms = expected_rate_ms;
38 sig->last_update = HAL_GetTick();
40
41 // Use custom limits if provided, otherwise use unit defaults
42 if (custom_min != custom_max) {
43 sig->custom_min = custom_min;
44 sig->custom_max = custom_max;
46 } else {
50 }
51
52 num_signals++;
53
56 return sig;
57}
Here is the call graph for this function:
Here is the caller graph for this function:
◆ sendCANTelemetryData()
| void sendCANTelemetryData | ( | TelemetrySignal * | signal, |
| uint32_t | can_id, | ||
| uint8_t * | data, | ||
| uint8_t | dlc | ||
| ) |
Definition at line 190 of file Telemetry.c.
190 {
193 return;
194 }
195
196 // Update timestamp
197 signal->last_update = HAL_GetTick();
198
199 // Format data as hex string
200 char hex_data[17] = {0}; // 8 bytes * 2 chars + null terminator
201 for (int i = 0; i < dlc && i < 8; i++) {
202 sprintf(&hex_data[i*2], "%02X", data[i]);
203 }
204
207}
Here is the call graph for this function:

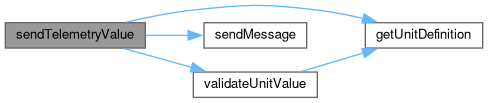
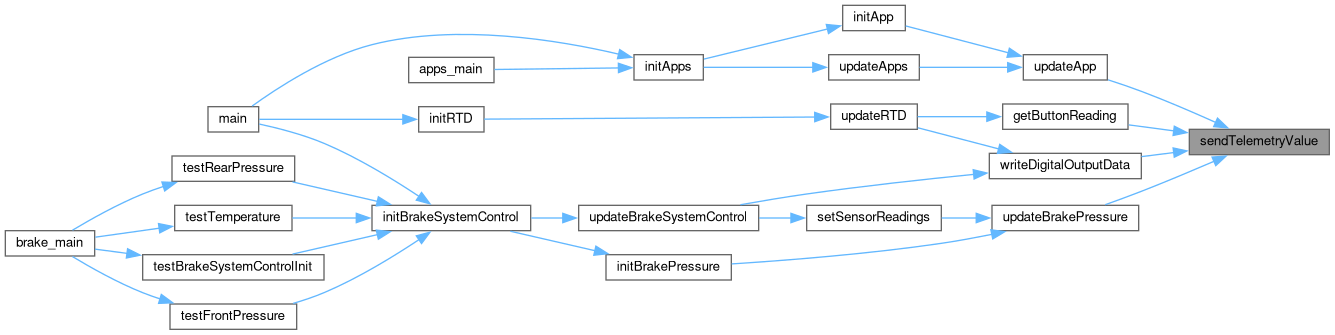
◆ sendTelemetryValue()
| void sendTelemetryValue | ( | TelemetrySignal * | signal, |
| float | value | ||
| ) |
Definition at line 59 of file Telemetry.c.
59 {
61 return;
62 }
63
65
66 // Update timestamp
67 signal->last_update = HAL_GetTick();
68
69 // Handle different telemetry types using the generic sendMessage()
72 // Validate and send sensor data
75 value, unit->symbol);
76 return;
77 }
78
79 // Check warning limits
82
83 if (value < min_limit || value > max_limit) {
85 value, unit->symbol, min_limit, max_limit);
86 }
87
88 // Send using generic sendMessage - no special sendSensorValue() needed!
90 break;
91
94 break;
95
98 break;
99
102 break;
103
106 // CAN data handled separately through sendCANTelemetryData()
107 break;
108 }
109}
Here is the call graph for this function:
Here is the caller graph for this function:
Variable Documentation
◆ num_signals
|
static |
Definition at line 9 of file Telemetry.c.
◆ signals
|
static |
Definition at line 8 of file Telemetry.c.
◆ telemetry_initialized
|
static |
Definition at line 10 of file Telemetry.c.