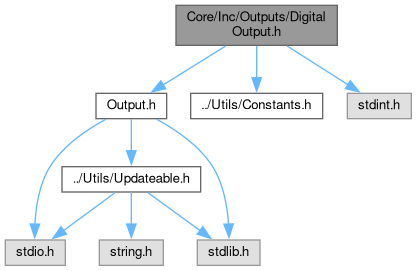
#include "Output.h"#include "../Utils/Constants.h"#include "../Utils/Telemetry.h"#include <stdint.h>
Include dependency graph for DigitalOutput.h:
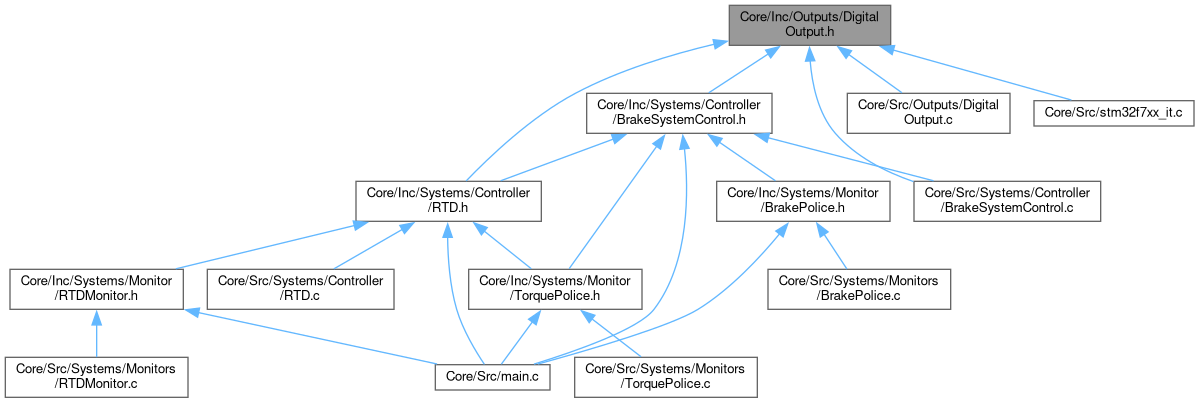
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | DigitalOutput |
Functions | |
| void | initDigitalOutput (DigitalOutput *digitaloutput, const char *name, int hz, int port) |
| Initializes a digital output with the given parameters. More... | |
| int | writeDigitalOutputData (DigitalOutput *output, int data) |
| Writes data to the buffer of the digital output. More... | |
Variables | |
| uint8_t | digital_out_buffer [NUM_DIGITAL_OUTPUTS] |
Function Documentation
◆ initDigitalOutput()
| void initDigitalOutput | ( | DigitalOutput * | digitaloutput, |
| const char * | name, | ||
| int | hz, | ||
| int | port | ||
| ) |
Initializes a digital output with the given parameters.
- Parameters
-
digitaloutput Pointer to the Output structure to initialize. name Pointer to a string containing the name of the output. hz The frequency in Hertz at which the output operates. port Location of the digital output on board.
Definition at line 6 of file DigitalOutput.c.
7 {
10 return;
11 }
13 digitalOutput->port = port;
14 digitalOutput->telem_state = registerTelemetrySignal(name, TELEMETRY_OUTPUT, UNIT_BOOLEAN, 1000/hz, 0, 1);
15}
void sendMessage(const char *sender, MessageType type, const char *format,...)
Definition: MessageFormat.c:5
void initOutput(Output *output, const char *name, int hz, OutputType type)
Initializes an output with the given parameters.
Definition: Output.c:4
TelemetrySignal * registerTelemetrySignal(const char *name, TelemetryType type, UnitId unit_id, uint32_t expected_rate_ms, float custom_min, float custom_max)
Definition: Telemetry.c:23
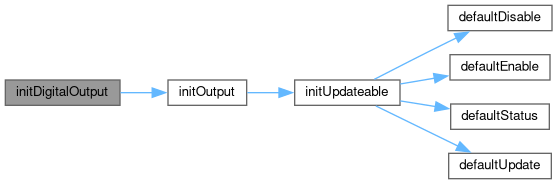
Here is the call graph for this function:
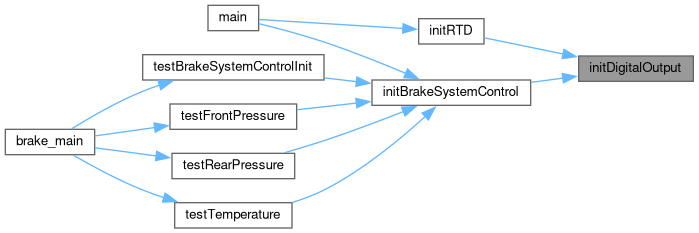
Here is the caller graph for this function:
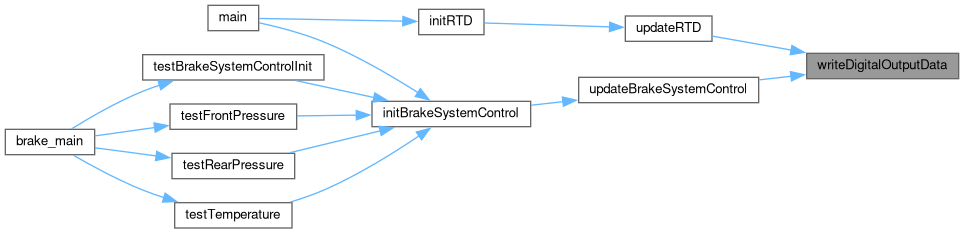
◆ writeDigitalOutputData()
| int writeDigitalOutputData | ( | DigitalOutput * | output, |
| int | data | ||
| ) |
Writes data to the buffer of the digital output.
- Parameters
-
output Pointer to the DigitalOutput structure. data Data to write to the output.
- Returns
- int _SUCCESS or _FAILURE.
Definition at line 17 of file DigitalOutput.c.
Here is the call graph for this function:

Here is the caller graph for this function:
Variable Documentation
◆ digital_out_buffer
|
extern |