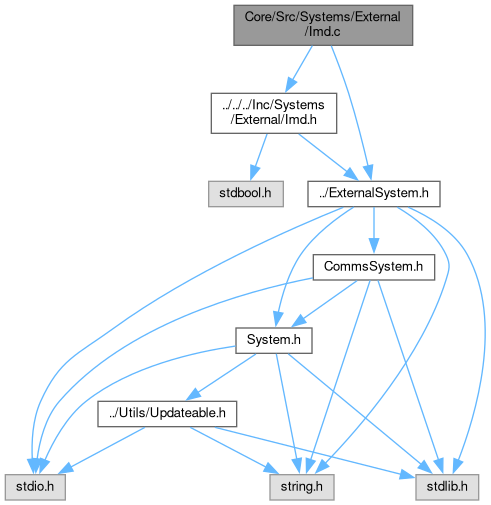
#include "../../../Inc/Systems/External/Imd.h"#include "../../../Inc/Systems/ExternalSystem.h"#include "../../../Inc/Utils/Updateable.h"#include "../../../Inc/Utils/Common.h"
Include dependency graph for Imd.c:
Go to the source code of this file.
Functions | |
| void | initIMD (IMDValues *IMD, int hz) |
| Initializes the IMD with the specified frequency. More... | |
| int | updateIMD (Updateable *updateable) |
| Updates the IMD values. More... | |
| int | getIMDStatus (void *imdValues, IMDStatus status) |
| Gets the status of the IMD. More... | |
| float | getIsoResistanceNeg (void *imdValues) |
| Retrieves the negative isolation resistance value from the given IMD values. More... | |
| float | getIsoResistancePos (void *imdValues) |
| Retrieves the positive isolation resistance value from the IMD values. More... | |
| float | getIsoResistanceCorrected (void *imdValues) |
| Retrieves the positive isolation resistance value from the IMD values. More... | |
Function Documentation
◆ getIMDStatus()
| int getIMDStatus | ( | void * | IMDValues, |
| IMDStatus | status | ||
| ) |
Gets the status of the IMD.
FIXME: Update this function to use Updateable ptr
- Parameters
-
IMDValues A pointer to the structure IMDValues. status An IMDStatus variable to store the retrieved status.
- Returns
- An integer representing the status of IMD.
◆ getIsoResistanceCorrected()
| float getIsoResistanceCorrected | ( | void * | IMDValues | ) |
Retrieves the positive isolation resistance value from the IMD values.
- Parameters
-
IMDValues Pointer to the structure containing IMD values.
- Returns
- The corrected isolation resistance value.
◆ getIsoResistanceNeg()
| float getIsoResistanceNeg | ( | void * | IMDValues | ) |
Retrieves the negative isolation resistance value from the given IMD values.
- Parameters
-
IMDValues Pointer to the structure containing IMD values.
- Returns
- The negative isolation resistance value.
◆ getIsoResistancePos()
| float getIsoResistancePos | ( | void * | IMDValues | ) |
Retrieves the positive isolation resistance value from the IMD values.
- Parameters
-
IMDValues Pointer to the structure containing IMD values.
- Returns
- The positive isolation resistance value.
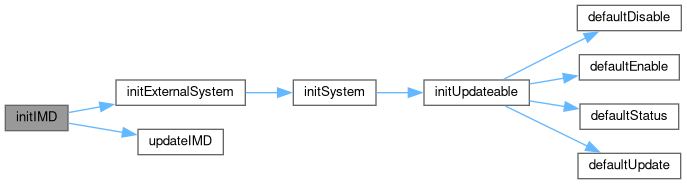
◆ initIMD()
| void initIMD | ( | IMDValues * | IMD, |
| int | hz | ||
| ) |
Initializes the IMD with the specified frequency.
- Parameters
-
IMD Pointer to the IMDValues structure to initialize. hz Frequency in hertz at which the IMD should operate.
Definition at line 6 of file Imd.c.
6 {
9 // IMD->base.system.updateable.status = getIMDStatus; // FIXME: Update getIMDStatus
11 IMD->IsoResistanceNeg = 0;
12 IMD->IsoResistancePos = 0;
13 IMD->IsoResistanceCorrected = 0;
14}
void initExternalSystem(ExternalSystem *external, const char *name, int hz, ExternalType type, int(*updateExternal)(ExternalSystem *external), int(*check_heartbeat)(void *self), void *child)
Definition: ExternalSystem.c:6
Here is the call graph for this function:
◆ updateIMD()
| int updateIMD | ( | Updateable * | updateable | ) |
Updates the IMD values.
- Parameters
-
updateable Pointer to the Updateable structure to update.
Definition at line 16 of file Imd.c.
16 {
17 //TODO: Implement logic to determine IMD status
18 /*if (something){
19 set IMD_ERROR;
20 } else if (something){
21 set IMD_START;
22 } else {*/
23 // set IMD_OK
25}
Here is the caller graph for this function:
