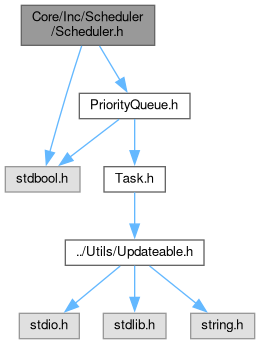
Include dependency graph for Scheduler.h:
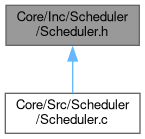
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | Scheduler |
Macros | |
| #define | MAX_SENSORS 32 |
| #define | MAX_HZ 1000 |
Functions | |
| void | SchedulerInit (Scheduler *scheduler, Updateable *updatableArray[]) |
| void | SchedulerRun (Scheduler *scheduler) |
| void | SchedulerStop (Scheduler *scheduler) |
| void | SchedulerSuspendUpdateable (const char *name) |
| void | SchedulerResumeUpdateable (const char *name) |
| void | SchedulerGetStats (void) |
| void | SchedulerCleanup (void) |
Macro Definition Documentation
◆ MAX_HZ
| #define MAX_HZ 1000 |
Definition at line 8 of file Scheduler.h.
◆ MAX_SENSORS
| #define MAX_SENSORS 32 |
Definition at line 7 of file Scheduler.h.
Function Documentation
◆ SchedulerCleanup()
| void SchedulerCleanup | ( | void | ) |
Definition at line 225 of file Scheduler.c.
225 {
226 // Delete worker task
228 vTaskDelete(workerTaskHandle);
229 workerTaskHandle = NULL;
230 }
231
232 // Delete work queue
234 vQueueDelete(workQueue);
235 workQueue = NULL;
236 }
237
238 // Delete all timers
241 xTimerDelete(scheduledTasks[i].timer, portMAX_DELAY);
243 }
244 }
245
246 taskCount = 0;
247 //printf("Scheduler cleaned up\n");
248}
◆ SchedulerGetStats()
| void SchedulerGetStats | ( | void | ) |
Definition at line 202 of file Scheduler.c.
202 {
203 UBaseType_t queueLength = uxQueueMessagesWaiting(workQueue);
204 UBaseType_t queueSpaces = uxQueueSpacesAvailable(workQueue);
205
206 //printf("Scheduler Statistics:\n");
207 //printf("- Active timers: %d\n", taskCount);
208 //printf("- Work queue: %lu items pending, %lu spaces available\n",
209 // queueLength, queueSpaces);
210
212 TaskStatus_t taskStatus;
213 vTaskGetInfo(workerTaskHandle, &taskStatus, pdTRUE, eInvalid);
214 //printf("- Worker task stack high water mark: %u words\n",
215 // taskStatus.usStackHighWaterMark);
216 }
217
219 //printf("WARNING: Work queue is %lu%% full - worker may be overloaded\n",
220 // (queueLength * 100) / WORK_QUEUE_SIZE);
221 }
222}
◆ SchedulerInit()
| void SchedulerInit | ( | Scheduler * | scheduler, |
| Updateable * | updatableArray[] | ||
| ) |
Definition at line 80 of file Scheduler.c.
80 {
81 scheduler->running = 0;
82 taskCount = 0;
83
84 // Create work queue for communicating between timer callbacks and worker task
87 //printf("ERROR: Failed to create work queue\n");
88 return;
89 }
90
91 // Create worker task to handle updateables
94 //printf("ERROR: Failed to create worker task\n");
95 return;
96 }
97
98 //printf("Created scheduler worker task\n");
99
100 // Create timers for each updateable
102 Updateable* updateable = updatableArray[i];
103
105 //printf("Warning: Skipping %s - invalid frequency %d Hz\n",
106 // updateable->name, updateable->hz);
107 continue;
108 }
109
110 // Calculate period in FreeRTOS ticks
111 TickType_t period = pdMS_TO_TICKS(1000 / updateable->hz);
112 if (period == 0) period = 1; // Minimum 1 tick for 1kHz tasks
113
114 // Create timer name
115 char timerName[32];
116 //printf(timerName, sizeof(timerName), "T_%s", updateable->name);
117
118 // Create FreeRTOS software timer
119 TimerHandle_t timer = xTimerCreate(
120 timerName, // Timer name
121 period, // Period in ticks
122 pdTRUE, // Auto-reload (periodic)
123 updateable, // Timer ID
125 );
126
127 if (timer != NULL) {
130 taskCount++;
131
132 //printf("Created timer: %s at %dHz (period: %lu ticks)\n",
133 // updateable->name, updateable->hz, period);
134 } else {
135 //printf("ERROR: Failed to create timer for %s\n", updateable->name);
136 }
137 }
138
139 //printf("Scheduler initialized with %d timers and worker task\n", taskCount);
140}
static void updateableTimerCallback(TimerHandle_t xTimer)
Definition: Scheduler.c:59
Definition: Updateable.h:23
Definition: Scheduler.c:13
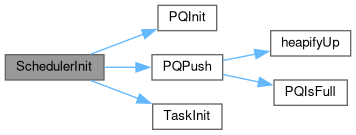
Here is the call graph for this function:
Here is the caller graph for this function:

◆ SchedulerResumeUpdateable()
| void SchedulerResumeUpdateable | ( | const char * | name | ) |
Definition at line 189 of file Scheduler.c.
189 {
192 strcmp(scheduledTasks[i].updateable->name, name) == 0) {
194 //printf("Resumed timer for %s\n", name);
195 return;
196 }
197 }
198 }
199 //printf("Warning: Could not find or resume timer for %s\n", name);
200}
◆ SchedulerRun()
| void SchedulerRun | ( | Scheduler * | scheduler | ) |
Definition at line 142 of file Scheduler.c.
142 {
143 scheduler->running = 1;
144
145 // Start all timers
146 int started = 0;
149 started++;
150 } else {
151 //printf("ERROR: Failed to start timer for %s\n",
152 // scheduledTasks[i].updateable->name);
153 }
154 }
155
156 //printf("Started %d/%d timers\n", started, taskCount);
157
158 // Start FreeRTOS scheduler
159 vTaskStartScheduler();
160}
Here is the caller graph for this function:

◆ SchedulerStop()
| void SchedulerStop | ( | Scheduler * | scheduler | ) |
Definition at line 162 of file Scheduler.c.
162 {
163 scheduler->running = 0;
164
165 // Stop all timers
168 xTimerStop(scheduledTasks[i].timer, portMAX_DELAY);
169 }
170 }
171
172 //printf("All timers stopped\n");
173}
◆ SchedulerSuspendUpdateable()
| void SchedulerSuspendUpdateable | ( | const char * | name | ) |
Definition at line 176 of file Scheduler.c.
176 {
179 strcmp(scheduledTasks[i].updateable->name, name) == 0) {
181 //printf("Suspended timer for %s\n", name);
182 return;
183 }
184 }
185 }
186 //printf("Warning: Could not find or suspend timer for %s\n", name);
187}