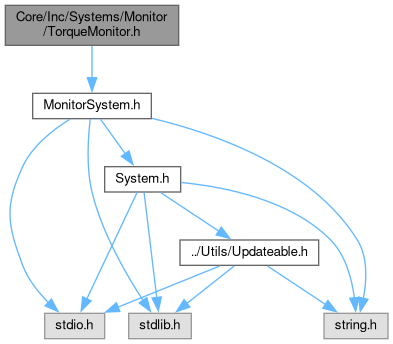
#include "MonitorSystem.h"
Include dependency graph for TorqueMonitor.h:
Go to the source code of this file.
Classes | |
| struct | TorqueControl |
Macros | |
| #define | TORQUE_ERROR_MARGIN 0.05 |
Enumerations | |
| enum | TorqueStatus { TORQUE_OK , TORQUE_OVER_LIMIT , TORQUE_UNDER_LIMIT , TORQUE_SENSOR_ERROR , TORQUE_OK , TORQUE_OVER_LIMIT , TORQUE_UNDER_LIMIT , TORQUE_SENSOR_ERROR } |
Functions | |
| void | initTorqueControl (TorqueControl *tc, int hz, float maxTorque) |
| Initializes the Torque Control Actuator with initial settings. More... | |
| void | setDesiredTorque (TorqueControl *tc, float torque) |
| Sets the desired torque for the Torque Control Actuator. More... | |
| void | setTorque (TorqueControl *tc, float torque) |
| void | updateTorqueControl (void *tc) |
| Updates the Torque Control Actuator based on sensor inputs and calculations. More... | |
| TorqueStatus | checkTorqueLimits (TorqueControl *tc) |
| Checks if the actual torque is within the defined limits and desired range. More... | |
| void | sendTorqueCommand (const TorqueControl *tc) |
Macro Definition Documentation
◆ TORQUE_ERROR_MARGIN
| #define TORQUE_ERROR_MARGIN 0.05 |
Definition at line 6 of file TorqueMonitor.h.
Enumeration Type Documentation
◆ TorqueStatus
| enum TorqueStatus |
| Enumerator | |
|---|---|
| TORQUE_OK | |
| TORQUE_OVER_LIMIT | |
| TORQUE_UNDER_LIMIT | |
| TORQUE_SENSOR_ERROR | |
| TORQUE_OK | |
| TORQUE_OVER_LIMIT | |
| TORQUE_UNDER_LIMIT | |
| TORQUE_SENSOR_ERROR | |
Definition at line 9 of file TorqueMonitor.h.
Function Documentation
◆ checkTorqueLimits()
| TorqueStatus checkTorqueLimits | ( | TorqueControl * | tc | ) |
Checks if the actual torque is within the defined limits and desired range.
TODO: move into torque police
- Note
- FIXME: When should each torque condition be in place?
- Parameters
-
tc A pointer to the TorqueControl structure.
- Returns
- The actual status of the torque.
Definition at line 58 of file TorqueControl.c.
58 {
61 }
64 }
65
68
71 }
72
74}
Here is the caller graph for this function:

◆ initTorqueControl()
| void initTorqueControl | ( | TorqueControl * | tc, |
| int | hz, | ||
| float | maxTorque | ||
| ) |
Initializes the Torque Control Actuator with initial settings.
- Parameters
-
tc A pointer to the TorqueControl structure. hz Rate at which the sensor is called (in hz). maxTorque The maximum torque limit set for the system (in Nm).
Definition at line 4 of file TorqueControl.c.
4 {
7 tc->actualTorque = 0;
8 tc->desiredTorque = 0;
9 tc->maxAllowedTorque = maxTorque;
12}
void initControllerSystem(ControllerSystem *controller, const char *name, int hz, ControllerType type)
Initializes the Controller System with initial settings.
Definition: ControllerSystem.c:4
void updateTorqueControl(void *tc)
Updates the Torque Control Actuator based on sensor inputs and calculations.
Definition: TorqueControl.c:43
int torqueSafetyCheck(void *tc)
Checks the safety of the torque with multiple monitors.
Definition: TorqueControl.c:76
◆ sendTorqueCommand()
| void sendTorqueCommand | ( | const TorqueControl * | tc | ) |
◆ setDesiredTorque()
| void setDesiredTorque | ( | TorqueControl * | tc, |
| float | torque | ||
| ) |
Sets the desired torque for the Torque Control Actuator.
- Note
- FIXME: Update to this to a map in the future.
- Parameters
-
tc A pointer to the TorqueControl structure. torque The desired torque to be set (in Nm).
Definition at line 27 of file TorqueControl.c.
27 {
29 printf("Torque Control Actuator is not in a safe state\n");
30 return;
31 }
33 printf("Desired torque exceeds the maximum allowed torque\n");
34 return;
35 }
36 tc->desiredTorque = torque;
37}
◆ setTorque()
| void setTorque | ( | TorqueControl * | tc, |
| float | torque | ||
| ) |
◆ updateTorqueControl()
| void updateTorqueControl | ( | void * | tc | ) |
Updates the Torque Control Actuator based on sensor inputs and calculations.
- Parameters
-
tc A pointer to the TorqueControl structure.
Definition at line 43 of file TorqueControl.c.
43 {
46 printf("Torque Control Actuator is not in a safe state\n");
47 return;
48 }
51 printf("Torque Control Actuator is not in OK\n");
52 return;
53 }
54 // TODO: Implement some way to send the torque where it needs to go
55 // sendTorqueCommand(tc);
56}
TorqueStatus checkTorqueLimits(TorqueControl *tc)
Checks if the actual torque is within the defined limits and desired range.
Definition: TorqueControl.c:58
Definition: TorqueControl.h:16
Here is the caller graph for this function:
