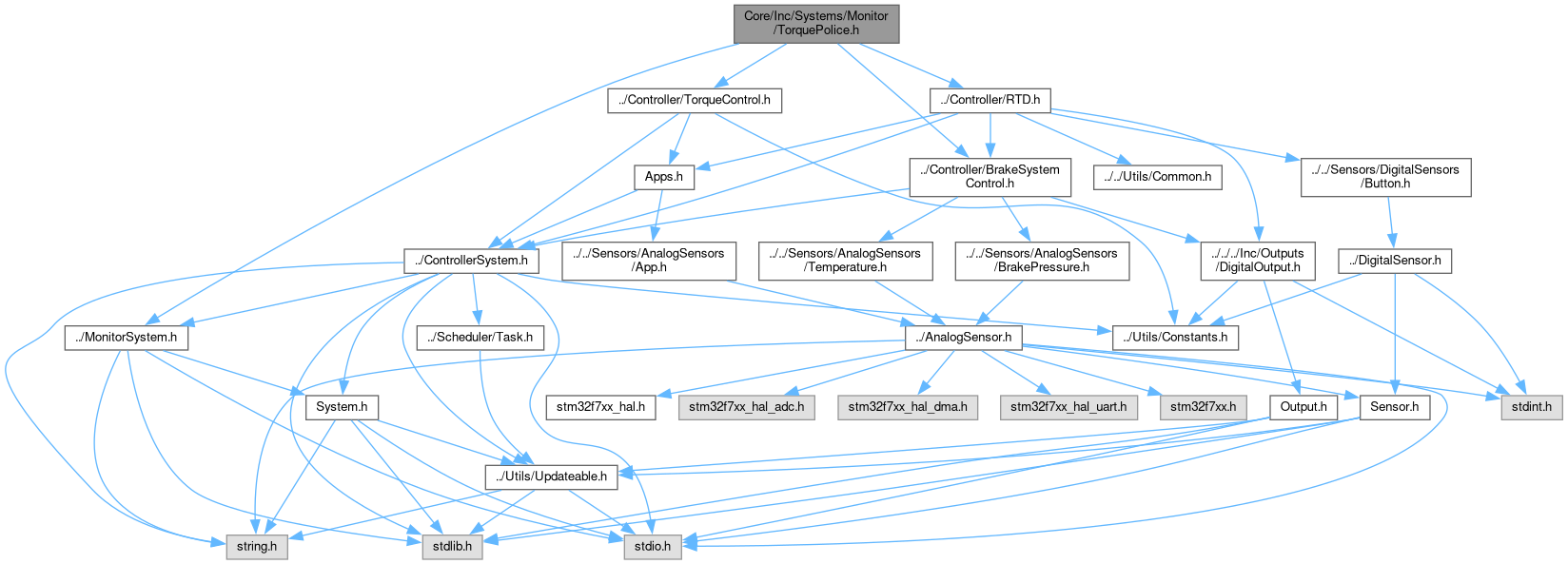
#include "../MonitorSystem.h"#include "../Controller/BrakeSystemControl.h"#include "../Controller/TorqueControl.h"#include "../Controller/RTD.h"
Include dependency graph for TorquePolice.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | TorquePolice |
Macros | |
| #define | TORQUE_ERROR_MARGIN 0.05 |
Functions | |
| void | initTorquePolice (TorquePolice *tp, TorqueControl *tc, BrakeSystemControl *bsc, RTD *rtd, int hz, float maxTorque) |
| int | startTorquePolice (TorquePolice *tp) |
| int | checkTorquePolice (void *tp) |
Macro Definition Documentation
◆ TORQUE_ERROR_MARGIN
| #define TORQUE_ERROR_MARGIN 0.05 |
Definition at line 9 of file TorquePolice.h.
Function Documentation
◆ checkTorquePolice()
| int checkTorquePolice | ( | void * | tp | ) |
Definition at line 25 of file TorquePolice.c.
25 {
30
33 tc->desiredTorque = 0;
34 #ifdef DEBUGn
35 //printf("RTD is not ready to drive, reducing torque to zero\r\n");
36 #endif
38 }
45 }
46
49 //printf("Brake System is in heavy braking, reducing torque to zero\r\n");
50 tc->desiredTorque = 0;
51 // Brake fight, reduce torque to zero. Not a system failure, but a safety measure.
52 // Thus, return _SUCCESS.s
54 }
55
58 //printf("Desired torque (%f) is too low, reducing to zero\r\n", tc->desiredTorque);
59 tc->desiredTorque = 0;
60 } else {
62 }
63
64 #ifdef DEBUGn
65 //printf("Actual Torque: %f\r\n", tc->desiredTorque);
66 #endif
68}
#define TORQUE_LOW_MARGIN
Definition: BrakeSystemControl.h:18
Definition: TorqueControl.h:18
Definition: TorquePolice.h:11
BrakeSystemControl * brakeSystemControl
Definition: TorquePolice.h:16
Here is the caller graph for this function:

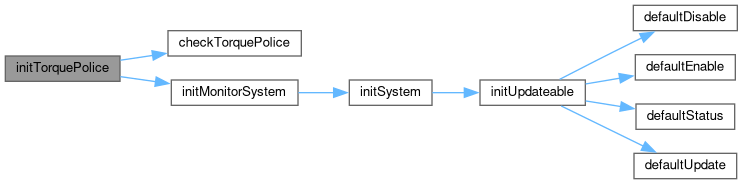
◆ initTorquePolice()
| void initTorquePolice | ( | TorquePolice * | tp, |
| TorqueControl * | tc, | ||
| BrakeSystemControl * | bsc, | ||
| RTD * | rtd, | ||
| int | hz, | ||
| float | maxTorque | ||
| ) |
Definition at line 5 of file TorquePolice.c.
5 {
7 tp->maxAllowedTorque = maxTorque;
9 tp->torqueControl = tc;
10 tp->brakeSystemControl = bsc;
11 tp->rtd = rtd;
12}
void initMonitorSystem(MonitorSystem *monitor, const char *name, int hz, MonitorType type, FaultType fault, int(*runMonitor)(void *self))
Initializes the Monitor System with initial settings.
Definition: MonitorSystem.c:3
Here is the call graph for this function:
Here is the caller graph for this function:

◆ startTorquePolice()
| int startTorquePolice | ( | TorquePolice * | tp | ) |
Definition at line 15 of file TorquePolice.c.
15 {
17 //printf("Monitor function not set for TorquePolice\n");
19 }
22}
Here is the caller graph for this function:
