#include <stdbool.h>#include <stdio.h>#include <stdlib.h>#include <string.h>#include <unistd.h>
Include dependency graph for main.c:
Go to the source code of this file.
Classes | |
| struct | map |
Macros | |
| #define | NUM_TESTS (sizeof(name_to_main) / sizeof(name_to_main[0])) |
Functions | |
| void | lut_main () |
| void | wheel_speed_main () |
| void | torque_control_main () |
| void | apps_main () |
| void | bms_main () |
| void | run_all_tests () |
| void | run_test (const char *name) |
| int | main (int argc, char **argv) |
Variables | |
| static map | name_to_main [] |
Macro Definition Documentation
◆ NUM_TESTS
| #define NUM_TESTS (sizeof(name_to_main) / sizeof(name_to_main[0])) |
Function Documentation
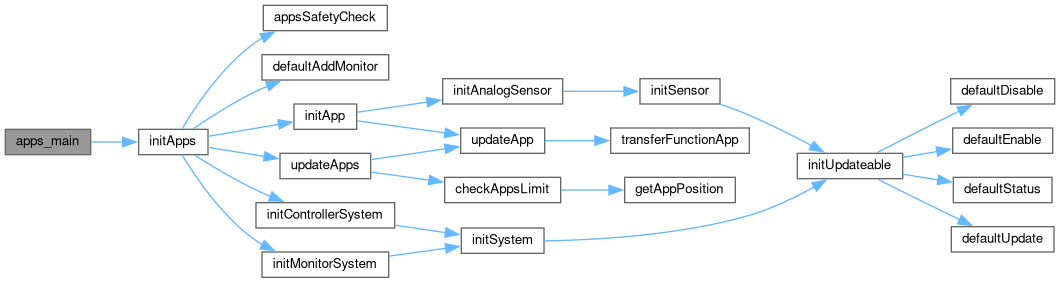
◆ apps_main()
| void apps_main | ( | ) |
Definition at line 13 of file AppsTest.c.
13 {
14 TEST(apps_init, {
15 Apps apps;
16 initApps(&apps, 0, 0, 1);
18 })
19
20 TEST(normal_operation_0, {
21 APPS_DO(0, 0)
23 ASSERT_EQ(pos, 0, "position", "expected position");
24 })
25
26 TEST(normal_operation_50, {
27 APPS_DO(50, 50)
29 ASSERT_EQ(pos, 50, "position", "expected position");
30 })
31
32 TEST(normal_operation_100, {
33 APPS_DO(100, 100)
35 ASSERT_EQ(pos, 100, "position", "expected position");
36 })
37
38 TEST(normal_operation_50_60, {
39 APPS_DO(50, 60);
42 })
43
44 TEST(normal_operation_55_56, {
45 APPS_DO(55, 56);
48 })
49
50 TEST(edge_difference_0_10, {
51 APPS_DO(0, 10);
54 })
55
56 TEST(edge_difference_50_60, {
57 APPS_DO(50, 60);
60 })
61
62 TEST(edge_difference_90_100, {
63 APPS_DO(90, 100);
66 })
67
68 TEST(edge_difference_0_1001, {
69 APPS_DO(0, 10.01);
72 })
73
74 TEST(edge_difference_50_61, {
75 APPS_DO(50, 51);
78 })
79
80 TEST(edge_difference_0_100, {
81 APPS_DO(0, 100);
84 })
85
86 TEST(sensor_1_under, {
87 APPS_DO(-1, 50);
90 })
91
92 TEST(sensor_1_over, {
93 APPS_DO(101, 50);
96 })
97
98 TEST(sensor_2_under, {
99 APPS_DO(50, -1);
102 })
103
104 TEST(sensor_2_over, {
105 APPS_DO(50, 101);
108 })
109
110 TEST(sensors_under, {
111 APPS_DO(-1, -1);
114 })
115
116 TEST(sensors_over, {
117 APPS_DO(101, 101);
120 })
121}
void initApps(Apps *apps, int hz, int channel1, int channel2)
Initializes the APPs with the given frequency and channel.
Definition: Apps.c:8
Here is the call graph for this function:
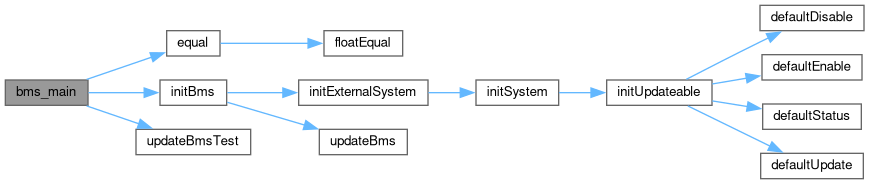
◆ bms_main()
| void bms_main | ( | ) |
Definition at line 32 of file BMSTest.c.
32 {
33 TEST(bms_init, {
34 Bms bms;
39 })
40
41 Bms expectedBms;
43 expectedBms.packVoltage = 600.0f;
44 expectedBms.packVoltage = 400.0f;
45 expectedBms.stateOfCharge = 80.0f;
46
47 TEST(bms_update, {
48 Bms bms;
51 // FIXME Should this be equal or !equal? Original had it as equal is a failure
53 })
54}
void initBms(Bms *bms, int hz, const char *dbcFn)
Initializes the BMS with the given frequency.
Definition: BMS.c:7
Here is the call graph for this function:
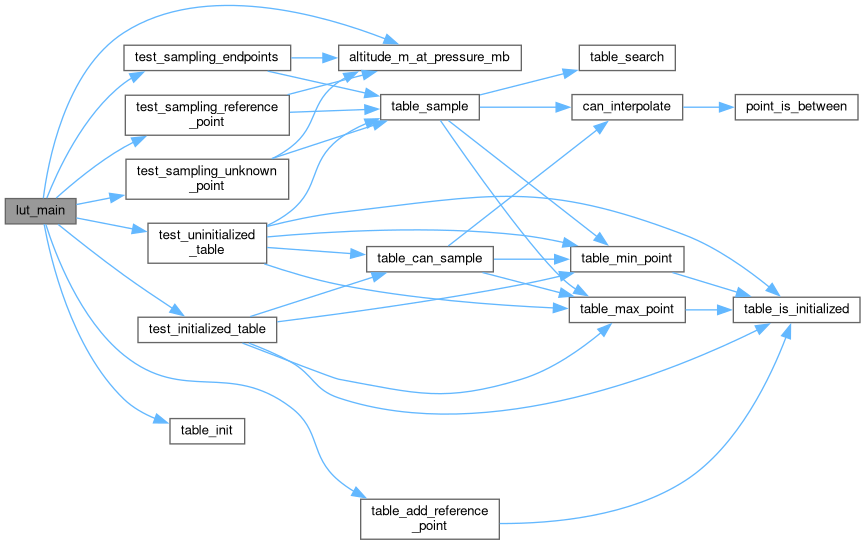
◆ lut_main()
| void lut_main | ( | ) |
Definition at line 115 of file LUT.c.
115 {
116 table pressure_mb_to_altitude_m;
117 assert(table_init(&pressure_mb_to_altitude_m, 9));
118
119 test_uninitialized_table(&pressure_mb_to_altitude_m);
120
121 // Initializes the table with equally-spaced points using the transfer
122 // function
123 for (unsigned int reference_pressure_mb = 300; reference_pressure_mb <= 1100;
124 reference_pressure_mb += 100) {
125 assert(table_add_reference_point(
126 &pressure_mb_to_altitude_m, reference_pressure_mb,
127 altitude_m_at_pressure_mb(reference_pressure_mb)));
128 }
129
130 test_initialized_table(&pressure_mb_to_altitude_m);
131
132 test_sampling_endpoints(&pressure_mb_to_altitude_m);
133
134 test_sampling_reference_point(&pressure_mb_to_altitude_m);
135
136 test_sampling_unknown_point(&pressure_mb_to_altitude_m);
137}
bool table_add_reference_point(table *table, float in, float out)
Adds a reference point to the table.
Definition: LUT.c:79
Here is the call graph for this function:
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 49 of file main.c.
49 {
50 bool all = false;
51
52 int opt;
53 while ((opt = getopt(argc, argv, "a")) != -1) {
54 switch (opt) {
55 case 'a':
56 all = true;
57 break;
58 default:
59 //printf(stderr, "Usage: %s [-a] [tests]\n", argv[0]);
60 exit(EXIT_FAILURE);
61 }
62 }
63
64 if (all) {
65 run_all_tests();
66 }
67
68 if (optind >= argc) {
69 //printf(stderr, "Expected name of test\n");
70 exit(EXIT_FAILURE);
71 }
72
73 for (int n = optind; n < argc; ++n) {
74 run_test(argv[n]);
75 }
76
77 return EXIT_SUCCESS;
78}
Here is the call graph for this function:
◆ run_all_tests()
| void run_all_tests | ( | ) |

◆ run_test()
| void run_test | ( | const char * | name | ) |
◆ torque_control_main()
| void torque_control_main | ( | ) |
Definition at line 14 of file TorqueControlActuatorTest.c.
14 {
15 TEST(torque_init, {
16 TorqueControl tc;
17 initTorqueControl(&tc, 0, 100);
19 })
20
21 TEST(update_normal, {
22 TORQUE_DO(75, 75)
24 })
25
26 TEST(update_below_desired, {
27 TORQUE_DO(93.5, 95)
29 })
30
31 TEST(update_above_desired, {
32 TORQUE_DO(98.5, 95)
34 })
35
36 TEST(update_over_limit, {
37 TORQUE_DO(101, 95)
39 })
40
41 TEST(update_negative_torque, {
42 TORQUE_DO(-10, 95)
44 })
45
46 TEST(update_sensor_error, {
47 TORQUE_DO(10, 80)
49 })
50}
void initTorqueControl(TorqueControl *tc, Apps *apps, int hz, float maxTorque)
Initializes the Torque Control Actuator with initial settings.
Definition: TorqueControl.c:6
Definition: TorqueControl.h:18
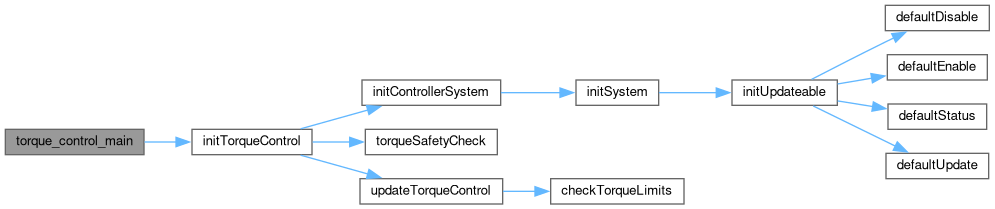
Here is the call graph for this function:
◆ wheel_speed_main()
| void wheel_speed_main | ( | ) |
Definition at line 17 of file WheelSpeedTest.c.
17 {
18 TEST(low_speed_1, {
20 "expected speed");
21 })
22
23 TEST(low_speed_2, {
25 "expected speed");
26 })
27
28 TEST(low_speed_3, {
30 "expected speed");
31 })
32
33 TEST(medium_speed_1, {
35 "speed", "expected speed");
36 })
37
38 TEST(medium_speed_2, {
40 "expected speed");
41 })
42
43 TEST(medium_speed_3, {
45 "expected speed");
46 })
47
48 TEST(high_speed_1, {
50 "speed", "expected speed");
51 })
52
53 TEST(high_speed_2, {
55 "speed", "expected speed");
56 })
57
58 TEST(high_speed_3, {
60 "expected speed");
61 })
62}
float testTransferFunction(float radius, int numTeeth, int pulseCount, float timeInterval)
Definition: WheelSpeedTest.c:4
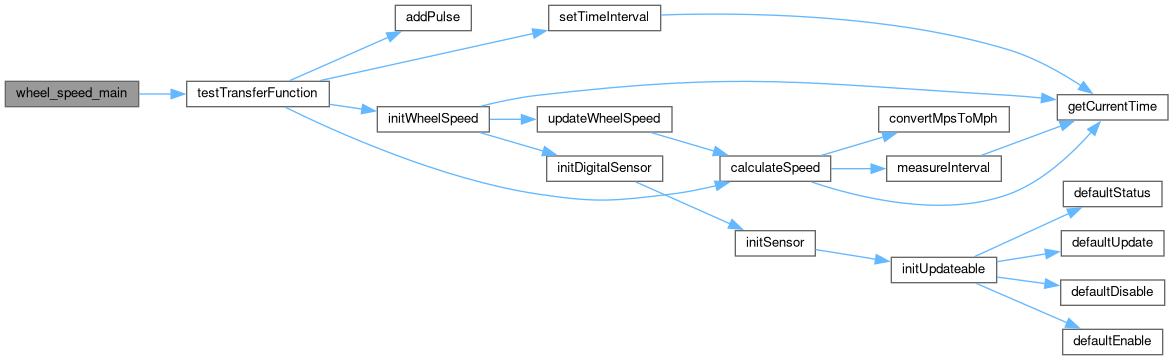
Here is the call graph for this function:
Variable Documentation
◆ name_to_main
|
static |
Initial value:
= {{"apps", apps_main},
{"bms", bms_main},
{"lut", lut_main},
{"torque_control", torque_control_main},
{"wheel_speed", wheel_speed_main}}