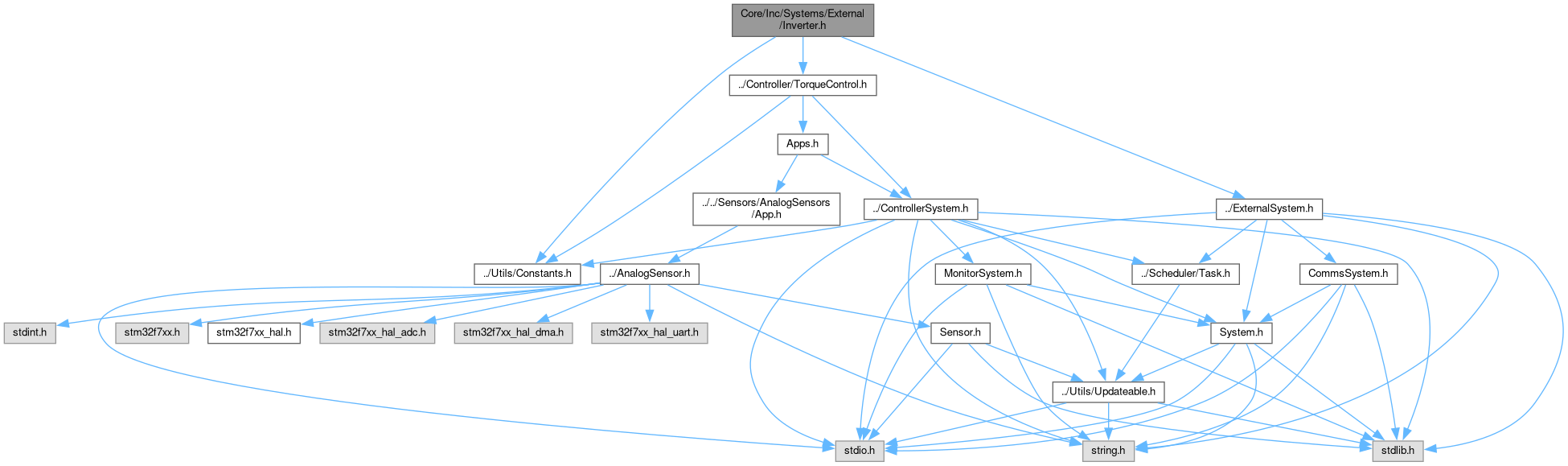
#include "../ExternalSystem.h"#include "../Controller/TorqueControl.h"#include "../../Utils/Constants.h"
Include dependency graph for Inverter.h:
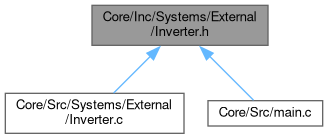
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | Inverter |
Functions | |
| void | initInverter (Inverter *inverter, TorqueControl *tc, int hz, int maxCurrent, int maxTemp, int maxVoltage) |
| Initializes the Inverter with initial settings. More... | |
| int | startInverter (Inverter *inverter) |
| Starts the Inverter. More... | |
| int | updateInverter (ExternalSystem *external) |
| Updates the Inverter. More... | |
| int | checkInverterHeartbeat (void *self) |
| Checks the heartbeat of the Inverter. More... | |
Variables | |
| uint32_t | dac1_buffer [DAC1_BUFFER_SIZE] |
Function Documentation
◆ checkInverterHeartbeat()
| int checkInverterHeartbeat | ( | void * | self | ) |
Checks the heartbeat of the Inverter.
- Parameters
-
self A pointer to the Inverter structure.
- Returns
- int _SUCCESS or _FAILURE.
Definition at line 33 of file Inverter.c.
Here is the caller graph for this function:

◆ initInverter()
| void initInverter | ( | Inverter * | inverter, |
| TorqueControl * | tc, | ||
| int | hz, | ||
| int | maxCurrent, | ||
| int | maxTemp, | ||
| int | maxVoltage | ||
| ) |
Initializes the Inverter with initial settings.
- Parameters
-
inverter A pointer to the Inverter structure. tc A pointer to the TorqueControl structure. hz Rate at which the inverter is called (in hz). maxCurrent The maximum current limit set for the inverter. maxTemp The maximum temperature limit set for the inverter. maxVoltage The maximum voltage limit set for the inverter.
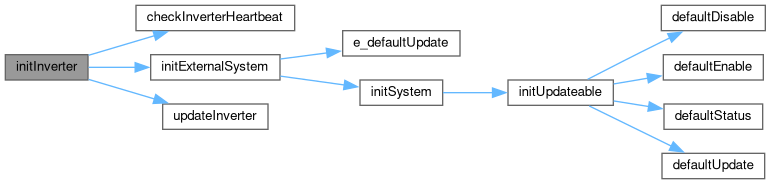
Definition at line 6 of file Inverter.c.
6 {
7 initExternalSystem(&inverter->base, "Inverter", hz, e_INVERTER, updateInverter, checkInverterHeartbeat, inverter);
8 inverter->tc = tc;
9 inverter->maxCurrent = maxCurrent;
10 inverter->maxTemp = maxTemp;
11 inverter->maxVoltage = maxVoltage;
12}
void initExternalSystem(ExternalSystem *external, const char *name, int hz, ExternalType type, int(*updateExternal)(ExternalSystem *external), int(*check_heartbeat)(void *self), void *child)
Definition: ExternalSystem.c:6
int checkInverterHeartbeat(void *self)
Checks the heartbeat of the Inverter.
Definition: Inverter.c:33
Here is the call graph for this function:
Here is the caller graph for this function:

◆ startInverter()
| int startInverter | ( | Inverter * | inverter | ) |
◆ updateInverter()
| int updateInverter | ( | ExternalSystem * | external | ) |
Updates the Inverter.
- Parameters
-
external A pointer to the Inverter ExternalSystem.
- Returns
- int _SUCCESS or _FAILURE.
Definition at line 14 of file Inverter.c.
14 {
16 // Check if torque control is validated
18 //printf("Inverter: Torque Control Actuator is not validated\r\n");
20 }
21
22
23 #ifdef DEBUGn
24 //printf("Inverter updated. Torque: %f, Current: %d, Temp: %d, Voltage: %d\r\n",
26 #endif
27
29
31}
Here is the caller graph for this function:

Variable Documentation
◆ dac1_buffer
|
extern |