#include "../../../Inc/Utils/Constants.h"#include "../../../Inc/Systems/Controller/RTD.h"#include "../../../Inc/Systems/ControllerSystem.h"#include "../../../Inc/Utils/Common.h"
Include dependency graph for RTD.c:
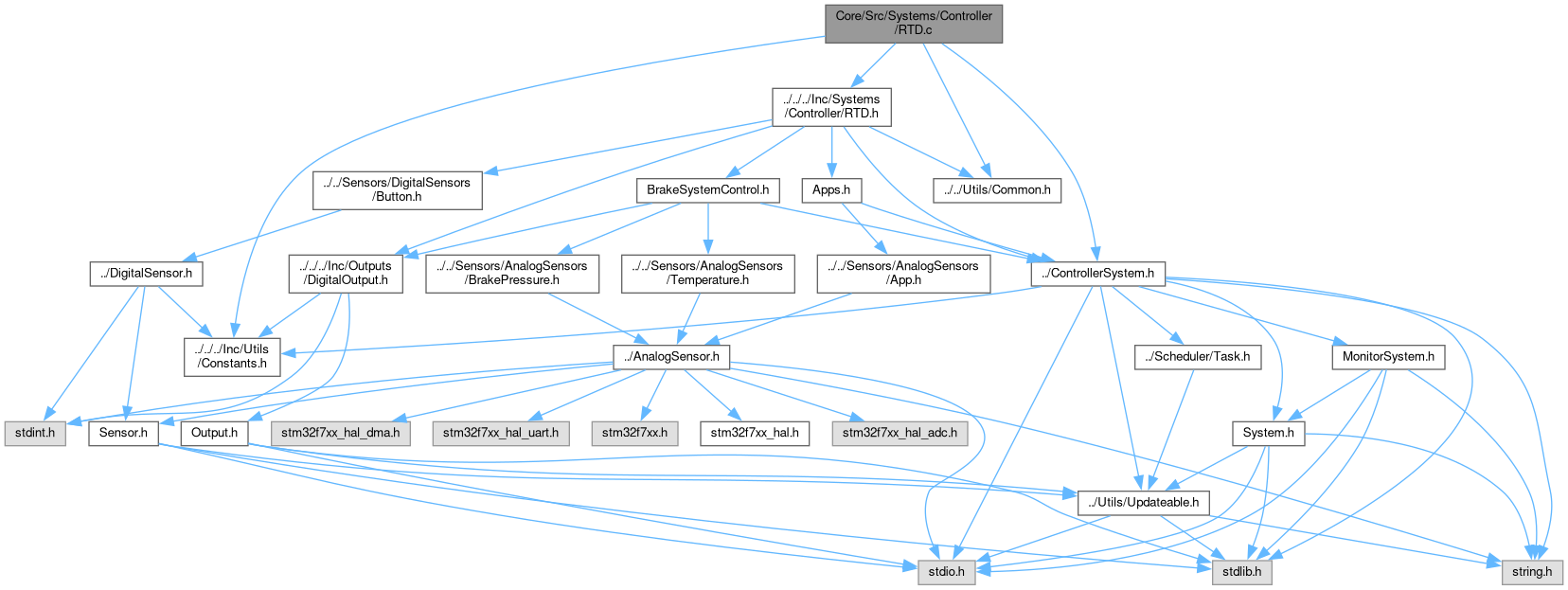
Go to the source code of this file.
Functions | |
| void | initRTD (RTD *rtd, Apps *apps, BrakeSystemControl *bsc, int hz, int buttonPort, int piezoPort) |
| Initializes the RTD Actuator with initial settings. More... | |
| int | startRTD (RTD *rtd) |
| Starts the RTD Actuator. More... | |
| int | updateRTD (ControllerSystem *controller) |
| Updates the RTD Actuator. More... | |
| int | checkRTD (void *rtd) |
| Checks if RTD is in ready to drive state. More... | |
Function Documentation
◆ checkRTD()
| int checkRTD | ( | void * | rtd | ) |
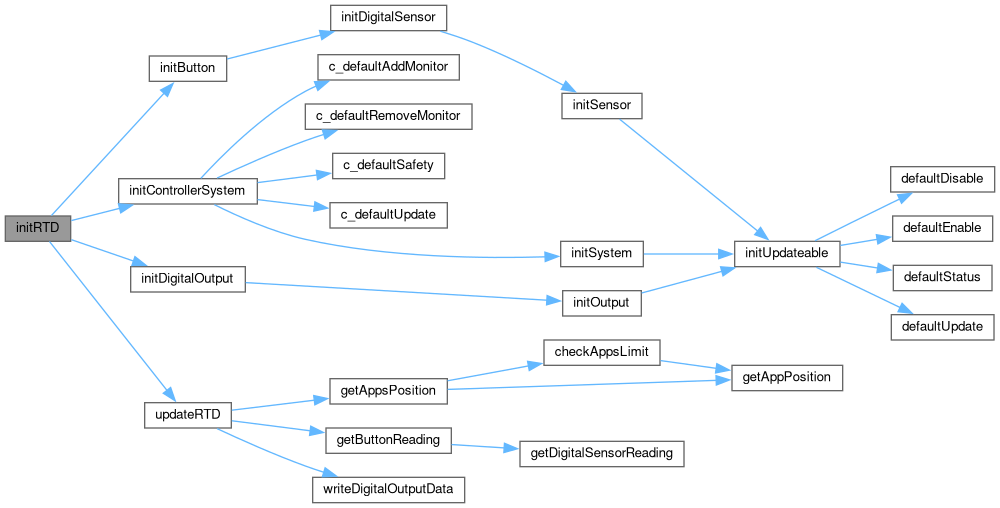
◆ initRTD()
| void initRTD | ( | RTD * | rtd, |
| Apps * | apps, | ||
| BrakeSystemControl * | bsc, | ||
| int | hz, | ||
| int | buttonPort, | ||
| int | piezoPort | ||
| ) |
Initializes the RTD Actuator with initial settings.
- Parameters
-
rtd A pointer to the RTD structure. hz Rate at which the sensor is called (in hz).
Definition at line 6 of file RTD.c.
6 {
8 rtd->readyToDrive = 0;
9 rtd->precharged = 0;
10 rtd->counter = 0;
11
13 rtd->button = &button;
15
17 rtd->piezo = &piezo;
19 rtd->apps = apps;
20 rtd->bsc = bsc;
21}
void initControllerSystem(ControllerSystem *controller, const char *name, int hz, ControllerType type, int(*updateController)(ControllerSystem *controller), void *child)
Initializes the Controller System with initial settings.
Definition: ControllerSystem.c:6
void initDigitalOutput(DigitalOutput *digitaloutput, const char *name, int hz, int port)
Initializes a digital output with the given parameters.
Definition: DigitalOutput.c:6
Definition: Button.h:7
Definition: DigitalOutput.h:12
Here is the call graph for this function:
Here is the caller graph for this function:
◆ startRTD()
| int startRTD | ( | RTD * | rtd | ) |
Starts the RTD Actuator.
- Parameters
-
rtd A pointer to the RTD structure.
- Returns
- _SUCCESS if the actuator was started, _FAILURE otherwise.
Definition at line 23 of file RTD.c.
23 {
25 //printf("Safety system not set for RTD\r\n");
27 }
29 //printf("RTD Actuator is not in a safe state\r\n");
31 }
35}
int(* safety)(struct ControllerSystem *controller)
Definition: ControllerSystem.h:35
Here is the caller graph for this function:

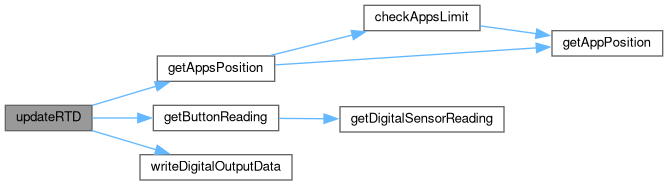
◆ updateRTD()
| int updateRTD | ( | ControllerSystem * | controller | ) |
Updates the RTD Actuator.
- Parameters
-
controller A pointer to the RTD ControllerSystem.
- Returns
- _SUCCESS if the actuator was updated, _FAILURE otherwise.
Definition at line 37 of file RTD.c.
37 {
39 // ping button to update in telemetry
41
43 //printf("RTD: Apps or Brake System Control Actuator is not validated\r\n");
45 }
46
48 //printf("RTD: APPS position is too high\r\n");
50 }
51
54 //printf("RTD: Brake pressure is too low\r\n");
56 }
57
60 }
61
63 rtd->counter++;
64 // Turn on piezo
66 } else {
67 // Turn off piezo
69 }
70
72
73 #ifdef DEBUGn
74 //printf("RTD updated. Ready to Drive: %d\r\n", rtd->readyToDrive);
75 #endif
76
78}
int writeDigitalOutputData(DigitalOutput *output, int data)
Writes data to the buffer of the digital output.
Definition: DigitalOutput.c:17
Here is the call graph for this function:
Here is the caller graph for this function:
